Содержание:
Применение программируемых логических контроллеров (ПЛК) совместно с преобразователями частоты (ПЧ) в современных системах автоматизации позволяет решать наиболее сложные задачи по управлению электродвигателем. Реализовать управление частотным преобразователем с контроллера возможно несколькими способами, один из которых - управление по цифровому интерфейсу RS-485. В данной статье будет рассмотрено подключение преобразователя частоты ELHART EMD-MINI к программируемому логическому контролеру Delta DVP14SS211R, настройка связи по интерфейсу RS-485 и протоколу Modbus RTU, приведен пример управляющей программы для контроллера, реализующую обмен данными и управление преобразователем частоты.
ВНИМАНИЕ! К работам по монтажу, наладке, ремонту и обслуживанию технологического оборудования допускаются лица, имеющие техническое образование и специальную подготовку (обучение и проверку знаний) по безопасному производству работ в электроустановках с группой не ниже 2 для ремонтного персонала, а также имеющие опыт работ по обслуживанию оборудования, в конструкцию которого вносятся изменения и дополнения, либо производится модернизация. За неисправность оборудования и безопасность работников при неквалифицированном монтаже и обслуживании ООО «КИП‑Сервис» ответственности не несет.
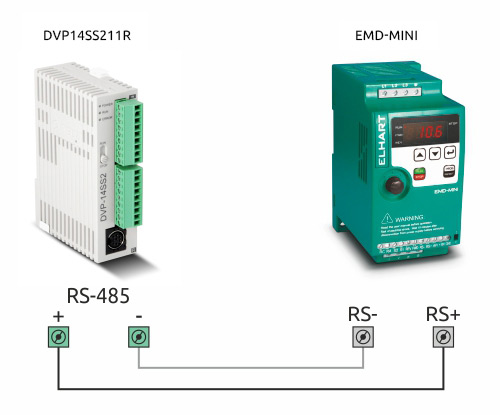
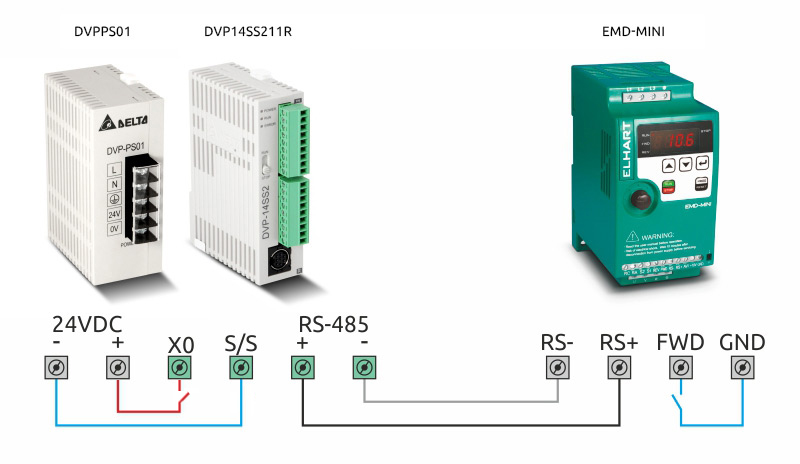
В данном примере для подключения преобразователя частоты к промышленному программируемому контроллеру используется порт COM2. Необходимо соединить клемму «+» порта контроллера с клеммой «RS+» преобразователя частоты и клемму «-» с клеммой «RS-» соответственно. Схема подключения изображена на рисунке 1.
В преобразователе частоты необходимо установить параметры согласно таблице 1.
| Параметр | Значение | Описание |
|---|---|---|
| P101 | 5 | Источник задания выходной частоты - интерфейс RS-485 |
| P102 | 2 | Источник команд управления - интерфейс RS-485 |
| P700 | 1 | Скорость передачи данных - 9600 бод |
| P701 | 3 | Формат данных - 8,N,1, протокол Modbus RTU |
| P702 | 1 | Адрес преобразователя частоты - 1 |
В данном примере будет рассмотрено чтение регистров состояния привода, текущей выходной частоты, состояния дискретных входов и дискретного выхода, запись команды управления приводом и задание выходной частоты. Адреса и описание регистров представлены в таблице 2.
| Параметр | Описание | Функция | Адрес | |
|---|---|---|---|---|
| Управление приводом | bit1-bit0 | 00B: нет действия 01B: Стоп 10B: Пуск 11B: работа на частоте JOG |
запись | 2000h |
| bit3-bit2 | 00B: нет действия 01B: вращение в обратном направлении 10B: вращение в прямом направлении 11B: сменить направление вращения |
|||
| bit4 | 0B: нет действия 1B: сброс аварии |
|||
| Задание выходной частоты | диапазон 0...9999 (0...999,9 Гц) | Чтение/Запись | 2001h | |
| Мониторинг состояния | bit0 | 0В: прямое направление вращения 1В: обратное направление вращения |
Чтение | 001Сh |
| bit1 | 0B: Стоп 1B: Пуск |
|||
| Текущая выходная частота | диапазон 0...9999 (0...999,9 Гц) | Чтение | 0002h | |
| Состояние дискретных входов и выходов | bit0 - вход FWD bit1 - вход REV bit2 - вход S1 bit3 - вход S2 bit9 - дискретный выход. |
Чтение | 0016h | |
Если необходимо использовать другие регистры, их адреса можно узнать по номеру параметра, указанного в руководстве по эксплуатации. Номер параметра соответствует адресу регистра в шестнадцатеричном формате, например:
Например, чтобы подать преобразователю частоты команду на пуск электродвигателя в прямом направлении, необходимо в регистр 2000h записать значение 1010b или число 10 в десятичном формате, а для запуска в обратном направлении - число 0110b или 6 в десятичном формате. Частота задается в регистре 2001h. Для того чтобы установить частоту вращения 30 Гц, в регистр необходимо записать число 300 в десятичном формате.
В данном примере будет описан процесс создания управляющей программы для ПЛК в среде WPLSoft на языке лестничных диаграмм (LD).
В первую очередь необходимо произвести настройку порта COM2 контроллера. Пример программы для настройки порта представлен на рисунке 2.

М1002 включается один раз при включении контроллера.
D1120 - конфигурация порта COM2. В преобразователе частоты EMD-MINI были установлены следующие настройки связи: скорость 9600 бод, 8 бит данных, контроль четности отсутствует, 1 стоповый бит. Такие же настройки необходимо установить для порта COM2 контроллера. Значения битов для регистра D1120 представлены в таблице 3.
| Номер бита | Описание | Значение |
|---|---|---|
| 0 | Длина данных | 0 - 7 бит данных 1 - 8 бит данных |
| 1-2 | Биты четности | 00 - нет 01 - нечетный 11 - четный |
| 3 | Стоп-биты | 0 - 1 бит 1 - 2 бит |
| 4-7 | Скорость передачи данных | 0000 - 110 0010 - 150 0011 - 300 0100 - 600 0101 - 1200 0110 - 2400 0111 - 4800 1000 - 9600 1001 - 19200 1010 - 38400 1011 - 57600 1100 - 11520 1101 - 500000 1110 - 31250 1111 - 921000 |
| 8 | Выбор стартового бита | 0 - нет; 1 - D1124 |
| 9 | Выбор 1-го конечного бита | 0 - нет; 1 - D1125 |
| 10 | Выбор 2-го конечного бита | 0 - нет; 1 - D1126 |
| 11-15 | Не используются |
В таблице 4 показано, как формируется значение для регистра D1120 с использованием данных из таблицы 3.
| Биты 15 - 8 | Скорость 9600 | 1 стоп-бит | Биты четности-нет | 8 бит данных |
|---|---|---|---|---|
| В данном примере не используются | 1000 | 0 | 00 | 1 |
В результате в регистр D1120 необходимо записать число 10000001b, предварительно переведя его в шестнадцатеричный формат - 81h. Также можно воспользоваться встроенным в WPLSoft калькулятором в разделе Help>Auxiliary Editing>Protocol⇔Setting Code (рисунок 3).
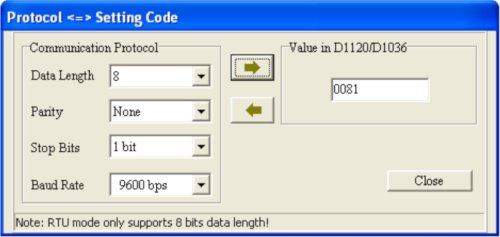
В полях слева необходимо выбрать конфигурацию протокола и нажать на стрелку вправо. В поле справа будет число в шестнадцатеричном формате, которое нужно записать в D1120.
М1143 - реле выбора режима ASCII/RTU. Если оно включено, то используется режим RTU, если выключено - режим ASCII.
D1129 - настройка времени ожидания ответа в миллисекундах. Если время ожидания ответа будет превышено, включится специальное реле М1129. В данном примере время ожидания составляет 300 миллисекунд.
М1120 - сохранение параметров связи для порта COM2.
После настройки коммуникационного порта ПЛК необходимо добавить в программу инициализации два регистра и записать в них значения, как это показано на рисунке 4.
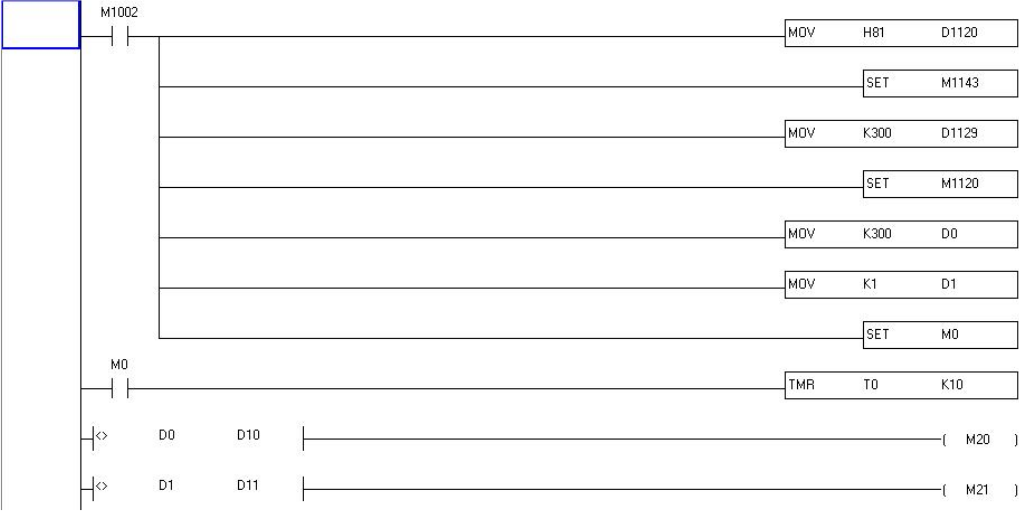
В регистре D0 будет находится значение установленной частоты, в регистре D1 - команды управления приводом. В данном примере после запуска контроллера в преобразователь частоты будет отправляться задание частоты 30
Гц и команда «Стоп».
Так как преобразователи частоты включаются медленнее чем промышленные контроллеры, то необходимо выждать некоторое время перед началом процедуры обмена по интерфейсу RS-485. В данном примере эту задержку реализует таймер T0 и задержка составляет 1 секунду.
Инструкции "LD<>" и внутренние реле М20 и М21 будут необходимы для отправки запроса на запись при изменении содержимого регистров D0 и D1.
Преобразователь частоты EMD-MINI поддерживает чтение Modbus-командой 03 и запись командой 06, поэтому для обмена данными удобно использовать инструкции MODRD для чтения и MODWR для записи. Так как в программе будет применяться несколько инструкций обмена данными, необходимо разделить их выполнение по времени так, чтобы в каждый момент выполнялась только одна из инструкций. Пример возможной реализации очередности запросов приведен на рисунке 5.
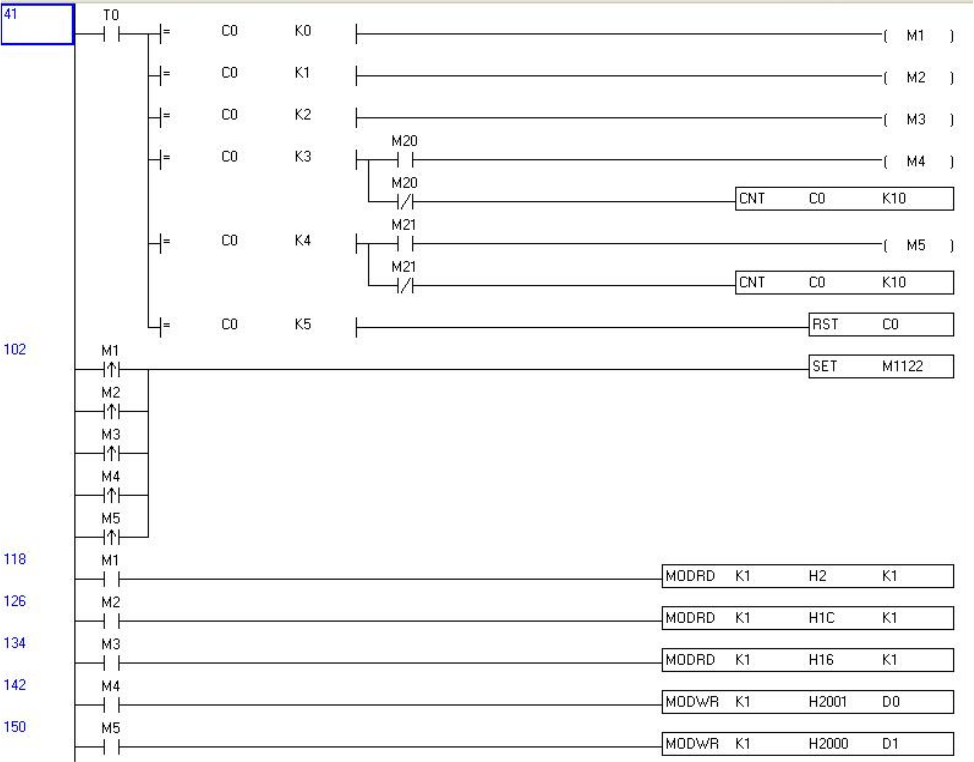
По истечении времени задержки включается выход таймера Т0 и происходит сравнение значения счетчика С0 с константой. При совпадении включается одно из внутренних реле M1 - M5, которые служат условием выполнения инструкций MODRD и MODWR. Для начала обмена данными необходимо включить специальное реле M1122, после чего будет выполнена одна из инструкций чтения или записи.
Первыми по порядку будут исполняться инструкции MODRD - чтение регистров. При значении счетчика С0=0 выполнится первая инструкция MODRD. В этой инструкции необходимо указать следующие параметры:
| MODRD | Адрес устройства | Адрес регистра | Длина данных |
|---|
Адрес устройства – 1 (значение К1);
Адрес регистра – 2 (значение Н2), текущая выходная частота;
Длина данных – 1 (значение К1), количество считываемых регистров.
Далее находятся еще две инструкции чтения – регистра состояния ПЧ (H1C) и регистра состояния дискретных входов и дискретного выхода (H16).
При работе инструкции MODRD считанные данные сохраняются в регистры D1070-D1076, как показано в таблице 5.
| Регистр | Данные |
|---|---|
| D1070 младший байт | Адрес устройства |
| D1071 младший байт | Код функции чтения |
| D1072 младший байт | Количество данных (байт) |
| D1073 младший байт | Содержимое регистра |
| D1074 младший байт | Содержимое регистра |
| D1075 младший байт | CRC |
| D1076 младший байт | CRC |
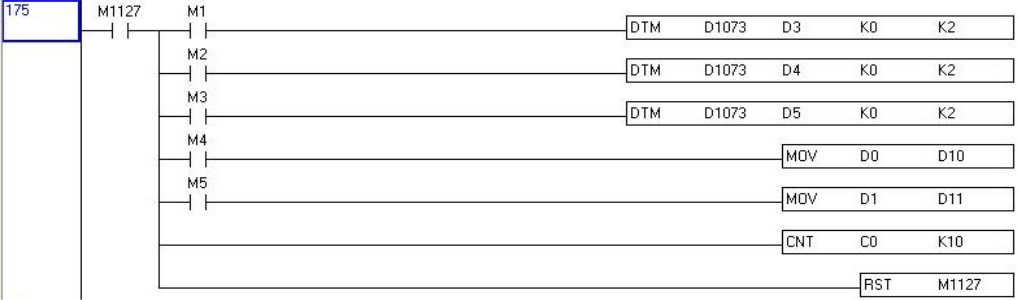
Как видно из таблицы, данные записываются в младшие байты регистров D1070-D1076 и для дальнейшего использования данные необходимо преобразовать и поместить в один регистр. Пример реализации преобразования приведен на рисунке 6.
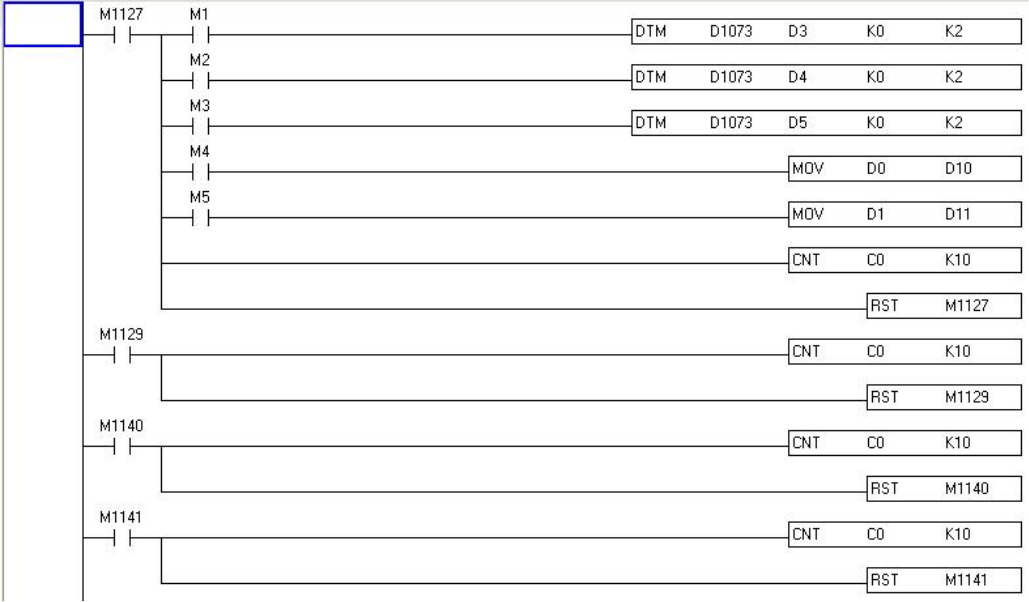
При срабатывании специального реле М1127 (завершение приема данных) происходит преобразование с помощью инструкции DTM. Младшие байты из регистров D1073 и D1074 объединяются и значение пересылается в регистр D3. Те же преобразования будут сделаны и для следующих двух инструкций чтения, после чего преобразованные данные будут помещены в регистры D4 и D5 соответственно.
При срабатывании специального реле М1127 или флагов ошибок приема или передачи (М1129, М1140 и М1141) происходит увеличение значения счетчика C0 и переход к следующей инструкции чтения или записи.
Пример записи регистров приведен на рисунке 7. Если значение регистров D0 или D1 изменяются, то срабатывают реле М20 или М21 и происходит исполнение соответствующей инструкции MODWR.
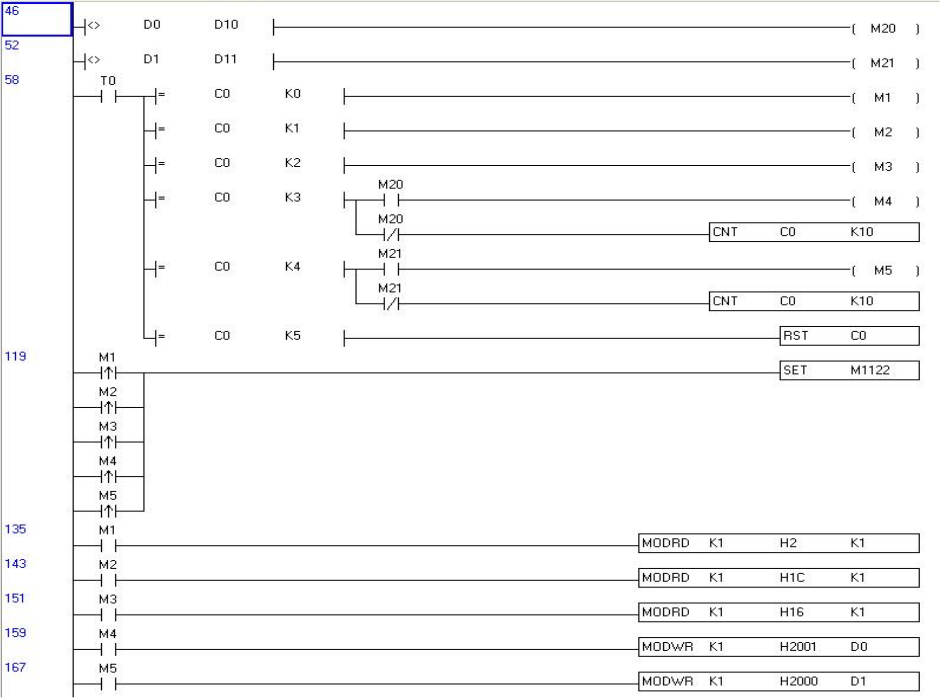
Порядок записи параметров инструкции MODWR:
| MODWR | Адрес устройства | Адрес регистра | Данные для записи |
|---|
Адрес преобразователя частоты - 1 (значение К1);
Адрес регистра - 2001 (значение Н2001), регистр, в который будет производиться запись;
Источник данных для записи - регистр D0.
Данные из регистра D0 записываются в регистр H2001, из D1 - в регистр Н2000. После успешной записи данные из регистра D0 копируются в регистр D10, а из регистра D1 - в регистр D11, реле M20 и М21 сбрасываются (рисунок 8).
Так как данные состояния дискретных входов и дискретного выхода считываются целым регистром, необходимо из считанного значения выделить нужные биты. Сделать это можно с помощью инструкции BLD - установка состояния нормально открытого контакта по заданному биту. Инструкция имеет следующий формат записи:
| BLD | Адрес регистра | Номер бита |
|---|
На рисунке 9 приведен фрагмент программы, где в регистрах D4 и D5 проверяется состояние определенных битов и затем их значения присваиваются внутренним реле М6-М12.
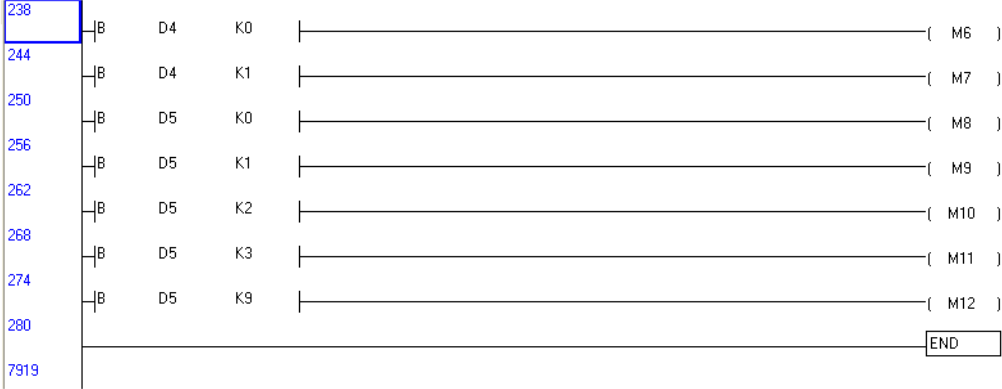
Например, в регистре D5 находятся данные, считанные из регистра 0016h преобразователя частоты. Значение K0 означает, что проверяется состояние входа FWD.
Все полученные значения из регистров преобразователя частоты EMD-MINI приведены в таблице 6.
| Регистр/реле | Описание |
|---|---|
| D0 | Задание частоты |
| D1 | Команды управления приводом |
| D3 | Текущая выходная частота |
| М6 | 0 - Прямое направления вращения 1 - Обратное направление вращения |
| М7 | 0 - ПЧ в режиме Стоп 1 - ПЧ в режиме Пуск |
| М8 | Состояние входа FWD |
| М9 | Состояние входа REV |
| М10 | Состояние входа S1 |
| M11 | Состояние входа S2 |
| M12 | Состояние дискретного выхода |
Нередко встречаются задачи, в которых необходимо осуществлять пуск на фиксированной частоте и остановку трехфазного асинхронного электродвигателя с программируемого логического контроллера, а также иметь возможность осуществлять локальное управление с кнопки. Для решения данной задачи следует произвести подключение кнопок, как показано на рисунке 10.
Также необходимо добавить в начало программы несколько инструкций (рисунок 11).
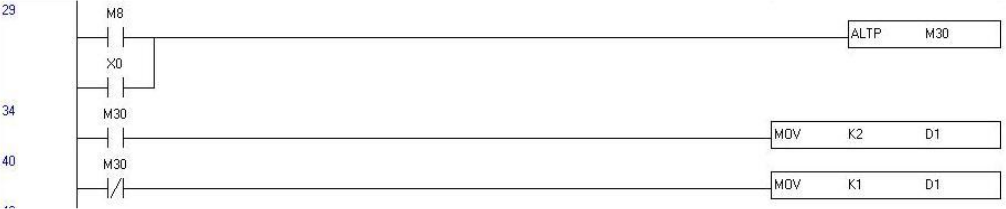
Внутреннее реле М8 - дискретный вход FWD преобразователя частоты, состояние которого считывает ПЛК по интерфейсу RS-485. К нему подключена кнопка c нормально открытым контактом без фиксации.
Х0 - вход ПЛК DVP14SS211R к которому подключена такая же кнопка. Инструкция ALTP инвертирует состояние внутреннего реле М30 каждый раз, когда включается М8 или X0. В результате, при нажатии на любую из кнопок произойдет запуск электродвигателя на частоте 30 Гц, при повторном нажатии – остановка.
Рассмотренный в данной статье пример показывает процедуру организации управления преобразователем частоты ELHART EMD-MINI c помощью программируемого логического контроллера DELTA DVP14SS211R. На основе этого примера можно создавать собственные, более сложные алгоритмы управления электроприводом.
Инженер ООО «КИП-Сервис»
Николай З.
Список использованной литературы:
Читайте также:
При добавлении товара возникла ошибка. Пожалуйста, повторите попытку чуть позже.