Содержание:
Задачи, требующие перемещения газов и жидкостей под напором, возникают и в промышленности, и в повседневной жизни. В промышленности используются компрессорные установки, системы смазки и охлаждения, системы транспортирования продуктов, различные гидравлические системы, приводы. В бытовой сфере применяются системы водоснабжения, вентиляции, отопления, кондиционирования, канализационные насосные станции. Используемые для этого насосы классифицируются по принципу работы и по конструкции, но большинство из них объединяет привод — асинхронный электродвигатель.
Данный двигатель получил широкое распространение благодаря своей простоте и надежности. Он не требует регулярного обслуживания, у него отсутствует скользящий контакт и возможен прямой пуск от сети. Ещё одно значительное преимущество — простота регулирования скорости вращения.
В данной статье рассмотрено частотное регулирование в сравнении с классическим дросселированием, описаны реализация и способ настройки на примере преобразователя частоты.
Работу любого насоса характеризует зависимость напор-подача (см. рисунок 1). Эта характеристика показывает, какой напор сможет обеспечить насос при текущей подаче.
Определить, сможет ли насос обеспечить требуемую производительность, можно по характеристике насоса и по требуемым в системе напору и подаче. На рисунке 2 представлена характеристика насоса с отмеченными точками: требуемый напор (Hтр) и требуемая подача (Qтр). Согласно графику данный насос сможет обеспечить требуемую производительность с определенным запасом (зеленая зона). Но если расход превысит значение Q1, насос не сможет обеспечивать требуемый напор (красная зона).
Если насос работает с постоянной подачей, требуется лишь выбрать модель соответствующей производительности. Но тогда как обеспечивать напор при переменной подаче? Ведь при изменении расхода жидкости будет меняться и создаваемый напор. Чем больше в системе будет расход, тем меньшее давление насос сможет обеспечить. И наоборот, при снижении расхода давление будет повышаться. Даже в представленном примере насос нагнетает напор больше (H1), чем требуется (Hтр).
Типовое решение данной проблемы — дросселирование. В напорный трубопровод добавляется сопротивление, снижающее давление при низком разборе. Дросселирование позволяет регулировать только в одну сторону — на уменьшение подачи. Поэтому для поддержания требуемого напора необходимо применить насос, производительность которого при Qтр сможет обеспечить Hтр (см. рисунок 3).
При снижении расхода (давление при этом растет) необходимо будет все больше закрывать дроссель. Работа в таком режиме неэффективна — целесообразно остановить насос, а при увеличении расхода запустить повторно. На рисунке 4 изображено, как при достижении требуемого напора (Hтр) происходит остановка насоса, а при падении ниже заданного порога (Hмин) — насос запускается вновь.
Такая система обрела популярность благодаря своей простоте, но имеет и ряд минусов:
1. В момент прямого пуска двигатель потребляет ток в 6-7 раз превышающий номинальный, что приводит к дополнительной нагрузке на сеть. При нехватке мощности питающей сети двигатель может не запуститься.
2. «Пусковые токи» – это кратковременное явление, но оно оказывает негативное влияние на обмотки двигателя (возможен перегрев и старение изоляции). Для каждого двигателя изготовитель указывает допустимое количество включений в час — это накладывает ограничение на частоту включения/отключения насосов.
3. Двухпозиционное регулирование зачастую является причиной колебательных процессов (см. рисунок 4). Запуск и остановка двигателя происходят скачкообразно — внезапное повышение давления приводит к возникновению гидроударов, повреждениям труб и запорной арматуры.
4. Дросселирование при переменной подаче является неэффективным с точки зрения энергозатрат, так как насос постоянно работает с номинальной скоростью.
Часть проблем решается дополнительным оборудованием:
Качество работы такой системы растет, но при этом растет и количество элементов в системе управления. Это влечет за собой снижение общей надежности и усложнение обслуживания.
Избавиться от вышеописанных проблем возможно при регулировании оборотов насоса. Существует зависимость расхода (Q) и напора (Н) от скорости вращения (n). Для центробежных насосов её описывает закон подобия:
Согласно ему, изменяя частоту вращения, возможно изменить характеристику насоса.
Из (1) и (2) следует:
Таким образом, с помощью полученной функции (3) можно построить подобные параболы и для других режимов работы, где n ≠ nном. На рисунке 5 изображены различные характеристики одного насоса, но на разных скоростях. Видно, что изменяя скорость вращения, можно обеспечить требуемое соотношение
Данные кривые построены с учетом постоянного КПД. В действительности с увеличением скорости вращения возрастает скорость потока и гидравлические потери в трубопроводе, а при снижении скорости увеличиваются механические потери в двигателе. Поэтому для каждого насоса имеется оптимальная скорость, при которой достигается максимальный КПД.
Стоит учесть, что у центробежных насосов значение напора находится в квадратичной зависимости от скорости вращения. Регулировать обороты достаточно в пределах 30-40 % от номинальной скорости. К тому же за счет регулирования скорости можно осуществить плавный разгон двигателя и избежать возникновения гидроударов, колебаний в системе и высоких пусковых токов.
В системах водоснабжения расход является переменной величиной, а давление должно быть неизменным. Если в такую систему добавить датчик давления (обратной связи), можно реализовать автоматический регулятор. В качестве таких регуляторов отлично зарекомендовали себя преобразователи частоты ELHART EMD-MINI и EMD-PUMP. Они имеют встроенный ПИД-регулятор и универсальный аналоговый вход. В данном разделе на примере преобразователя EMD-MINI будет рассмотрена типовая настройка параметров управления.
По умолчанию аналоговый вход ПЧ настроен на сигнал 0...10 В (к примеру, такой сигнал у датчиков mic+, преобразователей T201DCH, датчиков влажности). Чтобы запустить режим регулирования, достаточно подключить подобный датчик, задать параметр P600=1 и нажать кнопку «RUN». В зависимости от сигнала обратной связи преобразователь решит: оставаться на текущей частоте, понижать её или повышать. Конечно, для частного случая может потребоваться дополнительная настройка. За работу ПИД-регулятора отвечает шестая группа параметров (см. Таблицу 1).
| Код | Параметр | Описание параметра |
|---|---|---|
| P600 | Включение ПИД-регулятора | 0: Выключен 1: Включен 2: Включение по условию |
| P601 | Тип обратной связи ПИД-регулятора | 0: Отрицательная обратная связь 1: Положительная обратная связь |
| P602 | Источник задания уставки ПИД-регулятора | 0: Фиксированная уставка P604 1: Потенциометр на пульте управления ПЧ |
| P604 | Фиксированная уставка ПИД-регулятора | 0...100,0 % |
| P605 | Верхнее значение аварийного сигнала обратной связи ПИД-регулятора | 0...100 % |
| P606 | Нижнее значение аварийного сигнала обратной связи ПИД-регулятора | 0...100 % |
| P607 | Пропорциональная составляющая. ПИД-регулятора | 0...500,0 |
| P608 | Время интегрирования ПИД-регулятора | 0...200,0 сек |
| P609 | Время дифференцирования ПИД-регулятора | 0...200,0 сек |
| P611 | Частота входа в спящий режим | 0...120 Гц |
| P612 | Время задержки перехода в спящий режим | 0...200 сек |
| P613 | Уровень выхода из спящего режима | 0...100 % |
| P614 | Значение обратной связи, отображаемое на дисплее | 0...9999 |
| P615 | Кол-во разрядов, отображаемых на дисплее | 0...4 |
| P616 | Кол-во разрядов после точки, отображаемых на дисплее | 0...4 |
| P621 | Отслеживание обрыва сигнала AVI | 0: Не отслеживается 1: Индикация 2: Остановка с ручным сбросом аварии |
| P622 | Нижний уровень сигнала AVI | 0...2 В (4 мА соответствуют 1 В) |
| P623 | Время обнаружения обрыва сигнала | 0...20 сек |
Помимо настроек регулятора пользователю могут понадобиться дополнительные настройки:
| Код | Параметр | Значение |
|---|---|---|
| P000 | Параметр, отображаемый на дисплее после подачи питания | 0...12 |
| P102 | Источник команд управления | 0: Пульт управления 1: Многофункциональные дискретные входы 2: Интерфейс RS-485 |
| P106 | Минимальная выходная частота | 0...50 Гц |
| P300 | Минимальное напряжение на входе AVI | 0...10 В |
| P301 | Максимальное напряжение на входе AVI | 0...10 В |
| P315-318 | Многофункциональные дискретные входы | 0...25 |
| P325 | Многофункциональный релейный выход | 0...28 |
Ниже представлен пример использования ПЧ для управления насосной станцией:
В данном случае используется преобразователь давления PTE5000C-010-М20-С (диапазон измерения 10 бар, выход 4...20 мА). Команда на запуск насоса подается с внешнего переключателя. Схема подключения представлена на рисунке 6.
В примере указана схема подключения для ПЧ модификации EMD-MINI-015T (v1.0). Символ «T» обозначает тип питающего и выходного напряжения — трехфазное, 380В. Если обмотки используемого двигателя рассчитаны на напряжение 220В, существует модификация «S». Питающее напряжение таких ПЧ — однофазное, 220В (используются только клеммы L1 и L2), а выходное напряжение — трехфазное, 220В.
Для данной схемы подключения необходимо настроить параметры:
В результате мы получим регулятор давления, который поддерживает давление на уровне 5 бар. Он имеет возможность ухода в спящий режим при работе на частоте ниже 22 Гц в течение 60 секунд. Обладает аварийной индикацией и функцией автостарта. Приведенный пример показывает общее построение системы с ПЧ. Конечно, пользователь может более гибко настроить работу преобразователя под свои требования.
С помощью представленных параметров можно изменить:
Запускать ПЧ можно различными способами:
ПЧ может работать с положительной (P601=1) и отрицательной (P601=0) обратной связью (ОС). Регулятор с положительной ОС применяется в системах, где управляющее воздействие снижает контролируемую величину, например холодильные машины. А отрицательная ОС подходит для систем, где управляющее воздействие увеличивает контролируемую величину, например повысительные насосы.
Параметр P602 определяет способ задания уставки:
В ПЧ реализован ПИД-регулятор.
Параметры P607, P608 и P609 соответственно являются коэффициентами П, И, Д. В случае неудовлетворительной работы пользователь может вручную корректировать коэффициенты.
Если при работе выходная частота опускается ниже значения P611 в течение времени, заданного в P612, ПЧ останавливает двигатель. Выход из спящего режима происходит при превышении рассогласования на значение, заданное в параметре P613. Применение спящего режима позволяет повысить энергоэффективность системы. Для обеспечения стабильной работы необходимо установить минимальную выходную частоту — P106.
ПЧ поддерживает работу с аналоговыми сигналами 0...10 В и 4...20 мА. Для переключения аналогового входа на определенный сигнал нужно установить переключатель на корпусе ПЧ и задать соответствующие параметры:
Стоит учитывать, что предпочтительней использовать токовый сигнал, так как он обладает большей помехозащищенностью, чем сигнал 0...10 В.
ПЧ может отслеживать потерю сигнала обратной связи. «Обрыв датчика» — ситуация, когда значение сигнала ОС меньше P622 в течение времени P623. Реакцию на обрыв определяет параметр P621:
При необходимости показания подключенного датчика можно приводить к пользовательской шкале: с помощью P614, P615 и P616 пользователь может задать значение сигнала ОС, которое будет отображаться на дисплее.
К примеру, если сигнал датчика давления меняется в диапазоне 0.00...8.00 бар, необходимо задать параметры P614=800, P615=3, P616=2. Корректная настройка данных параметров важна. Относительно сигнала ОС задается уставка регулятора. У ПЧ серии EMD-MINI, выпущенных после четвертого квартала 2018 г., уставка задается в пользовательских единицах. А у ПЧ, выпущенных до этого периода, уставка задается в процентах относительно сигнала ОС. Например, если используется датчик давления (0...8 бар) и необходимо выставить задание на 6 бар, для старых модификаций ПЧ необходимо установить значение 75%, а для новых модификаций — 6 бар (Рисунок 7).
У ПЧ имеется настраиваемый параметр P000, который отвечает за дополнительный экран отображения (Рисунок 8).
Для EMD-MINI с ПО v1.0 возможно отображение ОС только в стандартном режиме. Для этого необходимо установить P000=7. В стандартном режиме на экране будут отображены значение ОС и задание одновременно.
Для EMD-MINI с ПО v1.1 доступны два варианта отображения. При P000=12 на экран будет выведен сигнал ОС в стандартном режиме. При P000=10 включается расширенный режим — сигнал ОС и задание выводятся на экран последовательно.
У ПЧ имеется релейный выход, который можно использовать для дополнительного информирования оператора, например с помощью сигнальной лампы. В P606 задается минимальное давление, а в P607 – максимальное, при котором сработает выход (при P325=14 или P325=15 соответственно). Возможна индикация обрыва датчика ОС, для этого нужно задать P325=16. Также релейный выход может срабатывать при возникновении аварийных ситуаций (P325=3).
При создании системы с частотным регулированием существуют некоторые особенности по использованию дополнительного оборудования и настройке системы:
Неотъемлемой частью системы регулирования является датчик давления. От него зависит точность работы всей насосной станции. В первую очередь датчик должен соответствовать требованиям:
Более подробно выбор датчиков давления описан в отдельной статье.

Насос может быть установлен как в систему холодного водоснабжения, так и горячего. Для обеспечения стабильной работы необходимо устанавливать датчик через трехходовой кран и сифонную трубку (Рисунок 10).
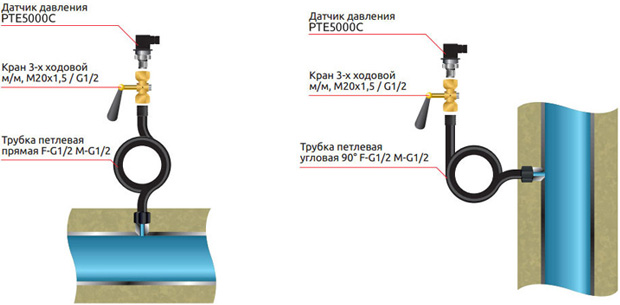
Кран позволяет производить безопасный монтаж датчика в трубопровод. При установке датчика без крана существует риск повреждения измерительного элемента – вкручивание датчика приводит к сжатию жидкости (давление начинает расти), и измерительный элемент механически разрушается. Петлевая трубка служит для охлаждения измеряемой среды, так как за счет нагрева самого датчика возможно образование конденсата внутри корпуса, который приводит к окислению и корродированию компонентов.
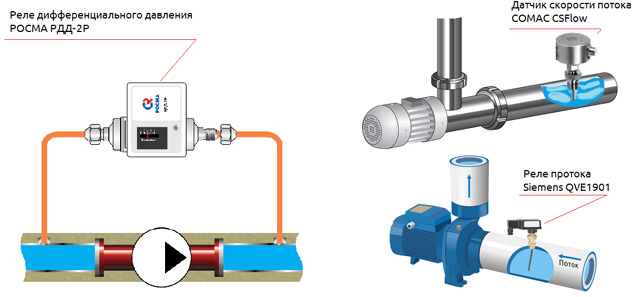
Для проверки работоспособности насоса необходимо контролировать перепад давления или скорость потока в системе (Рисунок 11). Это позволит на раннем этапе диагностировать снижение производительности насоса и не допустить чрезмерного износа оборудования.
Благодаря своей простоте широкое распространение получили реле дифференциального давления, которые сравнивают показания в двух измерительных точках. Релейный выход срабатывает при достижении заданного оператором перепада. Для насосов с малым напором возможно применение реле протока и датчиков скорости. Сигналы с данных устройств могут использоваться как самим ПЧ (для аварийной остановки), так и для верхнего уровня АСУ ТП (например для сбора статистики).
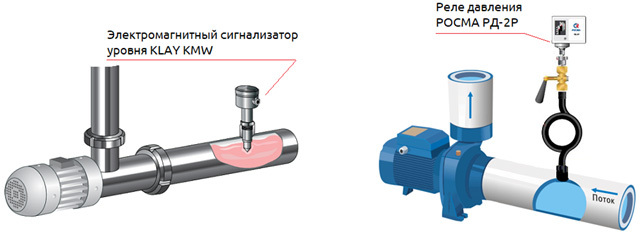
В зависимости от конструкции насоса существует риск его перегрева и выхода из строя. Часто причиной является работа насоса при отсутствии рабочей среды в подающем трубопроводе. Для защиты применяют различные датчики сухого хода (Рисунок 12), которые отслеживают наличие жидкости или давления. Например, в системах, где в подающем трубопроводе присутствует избыточное давление, достаточно использовать реле давления (прессостат). А при малом давлении в подающем трубопроводе оптимально использовать электромагнитные сигнализаторы.
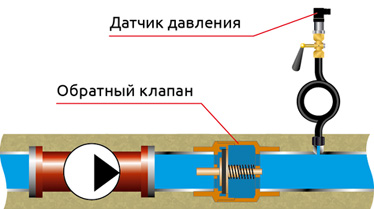
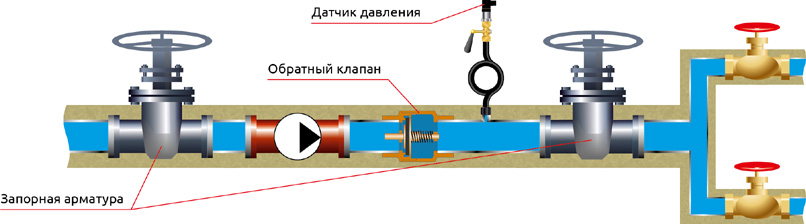
При построении системы с частотным регулированием возможна нестабильная работа спящего режима. ПЧ может с высокой цикличностью производить запуск и остановку насоса или вовсе не уходить в спящий режим. Особенно эта проблема распространена на скважинных насосах. Она связана с тем, что при достижении рабочего давления ПЧ постепенно снижает выходную частоту. Значение напора постепенно падает, и под действием силы тяжести вода может менять направление потока. Для решения данной проблемы необходимо использовать обратный клапан. На рисунке 13 представлен пример установки обратного клапана со стороны напорного трубопровода.
Также в некоторых ситуациях подобное поведение возможно у системы с уже установленным обратным клапаном. Это может быть обусловлено неправильно настроенной частотой входа в спящий режим. В таком случае необходимо опытным путем снизить частоту входа в спящий режим (P611) до значения, при котором насос обеспечит оптимальную работу.
Необходимо учитывать требования СП 31.13330.2012 (п. 10.8 и 10.9) по оборудованию насосных станций запорной арматурой. Это позволит беспрепятственно производить техническое обслуживание оборудования на насосной станции.
Современные преобразователи частоты обладают достаточным функционалом для работы в системах поддержания давления. Они с легкостью заменяют системы дроссельного регулирования, обладая следующими преимуществами:
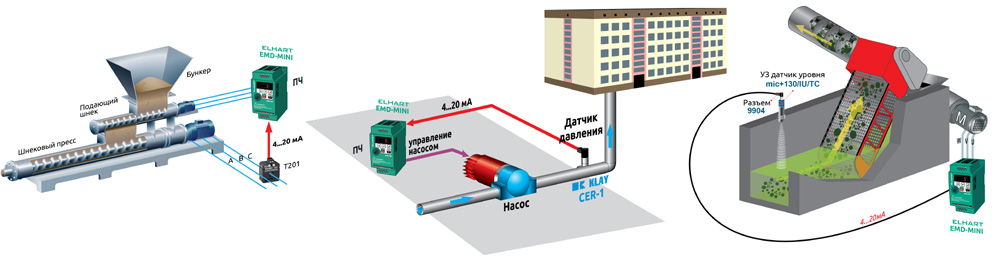
Кроме того, благодаря встроенному регулятору и универсальному аналоговому входу, применение ПЧ не ограничено насосным оборудованием. Различные компрессорные и климатические установки, транспортеры, шнековые агрегаты и множество других систем, где управляющее воздействие оказывается за счет асинхронного двигателя, можно автоматизировать с помощью линейки преобразователей EMD-MINI.
Инженер ООО «КИП-Сервис»
Александр Т.
Список использованной литературы:
При добавлении товара возникла ошибка. Пожалуйста, повторите попытку чуть позже.