Содержание:
В данной статье будет рассмотрен пример подключения сенсорной панели оператора ELHART ECP-07 к преобразователю частоты EMD-MINI-007 S (далее ПЧ). Пример содержит процедуру запуска и остановки электродвигателя, задание частоты вращения и отображение рабочих параметров. Подключение к панелям ELP осуществляется аналогично.
ВНИМАНИЕ! К работам по монтажу, наладке, ремонту и обслуживанию технологического оборудования допускаются лица, имеющие техническое образование и специальную подготовку (обучение и проверку знаний) по безопасному производству работ в электроустановках с группой не ниже 2 для ремонтного персонала, а также имеющие опыт работ по обслуживанию оборудования, в конструкцию которого вносятся изменения и дополнения, либо производится модернизация. За неисправность оборудования и безопасность работников при неквалифицированном монтаже и обслуживании ООО «КИП‑Сервис» ответственности не несет.
ПЧ ELHART EMD-MINI-007 S имеет COM-порт для подключения устройств по интерфейсу связи RS-485. Возможна передача данных по протоколу Modbus RTU или ASCII. ПЧ в сети Modbus работает в режиме Slave (подчиненное устройство). Перечисленные технические особенности позволяют реализовать дистанционное управление преобразователем частоты. В нижней части клеммной колодки расположены клеммы для подключения RS+ и RS-.
Графическая панель оператора ELHART ECP-07 имеет четыре COM порта, из которых COM1, COM2 и COM4 могут работать по интерфейсу связи RS-485. Порт COM1 выполнен в виде разъема DB9-M (подключение к контактам 6 (A+) и 1 (B-)). Порты COM2 и COM4 выполнены в виде клеммной колодки, клеммы для подключения подписаны как A+ и B-.
В данной статье рассматривается подключение к порту COM2. Контакт RS+ ПЧ необходимо подключить к контакту A+ панели оператора, а контакт RS- к контакту B-. Схема соединений представлена на рисунке 1.

Для удаленного управления преобразователем частоты EMD-MINI-007 S по интерфейсу RS-485 необходимо в настройках задать параметры согласно таблице 1.
| Номер параметра | Устанавливаемое значение | Описание |
|---|---|---|
| Р101 | 5 | Источник задания выходной частоты - RS-485 |
| Р102 | 2 | Источник команд управления - RS-485 |
| Р700 | 1 | Скорость передачи данных — 9600 бод/с |
| Р701 | 3 | Параметры связи — 8,N,1, RTU |
| Р702 | 4 | Коммуникационный адрес |
Полный перечень настраиваемых параметров ПЧ приведен в Кратком руководстве, или в Руководстве по эксплуатации. Параметры Р700, Р701, Р702 могут быть заданы пользователем на его усмотрение, но они должны быть идентичны как на приемной, так и на передающей стороне. Перед первоначальной настройкой рекомендуется сбросить все параметры на заводские значения (в параметре Р117 необходимо ввести значение 8). Перед подключением электродвигателя необходимо также задать его параметры в соответствии с информацией, указанной на шильдике двигателя и в его Паспорте (в настройках ПЧ параметры - Р209...Р213).
В процессе создания проекта в программном обеспечении для операторской панели ELHART HMI Soft при настройке порта COM2 необходимо задать параметры согласно рисунку 2.
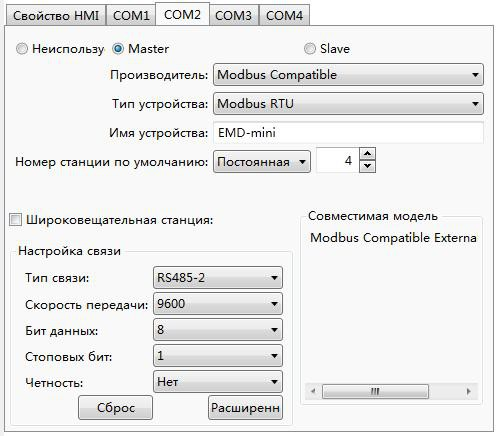
Во вкладке «Производитель» выбираем «Modbus Compatible», во вкладке «Тип устройства» - «Modbus RTU». Скорость передачи данных, количество бит данных, количество стоповых бит и четность должны совпадать с теми значениями, которые выбраны в настройках преобразователя частоты (Р700, Р701, Р702 в Сводной таблице параметров). Для каждого ПЧ в сети должен быть задан свой адрес (в данном примере задан адрес 4).
Адресация регистров в памяти ПЧ соответствует номеру параметра в Сводной таблице параметров. Например, параметр Р700 имеет адрес 700 DEC или 2BC HEX. Перечень регистров из памяти ПЧ, использованных при написании данной статьи, представлен в таблице 2.
| Адрес DEC | Тип данных | Формат доступа | Наименование |
|---|---|---|---|
| 3 | 16-бит Unsigned | R | Выходная частота |
| 4 | 16-бит Unsigned | R | Выходной ток |
| 5 | 16-бит Unsigned | R | Скорость вращения |
| 10 | 16-бит Unsigned | R | Выходное напряжение |
| 108 | 16-бит Unsigned | R/W | Время ускорения |
| 109 | 16-бит Unsigned | R/W | Время замедления |
| 8193 | 16-бит, 0-й бит в регистре | R/W | Остановка двигателя |
| 16-бит, 1-й бит в регистре | R/W | Запуск двигателя | |
| 16-бит, 2-й бит в регистре | R/W | Вращение в обратном направлении | |
| 16-бит, 3-й бит в регистре | R/W | Вращение в прямом направлении | |
| 8194 | 16-бит Unsigned | R/W | Задание выходной частоты |
При вводе адреса регистра в ELHART HMI Soft необходимо увеличить его значение на единицу (в таблице 2 адреса уже инкрементированы).
Инкрементирование адреса связано со структурой памяти контроллеров Modicon, для которых первоначально разрабатывался протокол передачи данных Modbus. Протокол получил широкое распространение в промышленности, но модель данных практически не изменилась.
Для удаленного запуска и остановки двигателя с панели оператора, подключенной к ПЧ по RS-485, создадим в проекте ELHART HMI Soft кнопки «Пуск» и «Стоп». В главном меню необходимо выбрать «Компоненты/Клавиши/ Bit- изменить». Окно настройки кнопки представлено на рисунке 3.
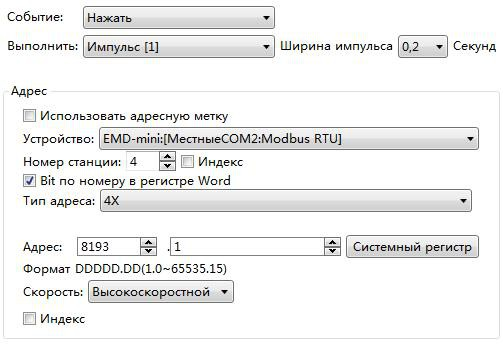
Регистр команд управления «Пуск/Стоп» имеет адрес 2000 HEX. Задание адреса в окне настройки кнопки производится в десятичной системе счисления с добавлением единицы, поэтому в итоге получится адрес 8193 DEC. Это Word регистр, в котором содержится битовая маска команд управления: бит 0 отвечает за остановку ПЧ, а бит 1 за запуск.
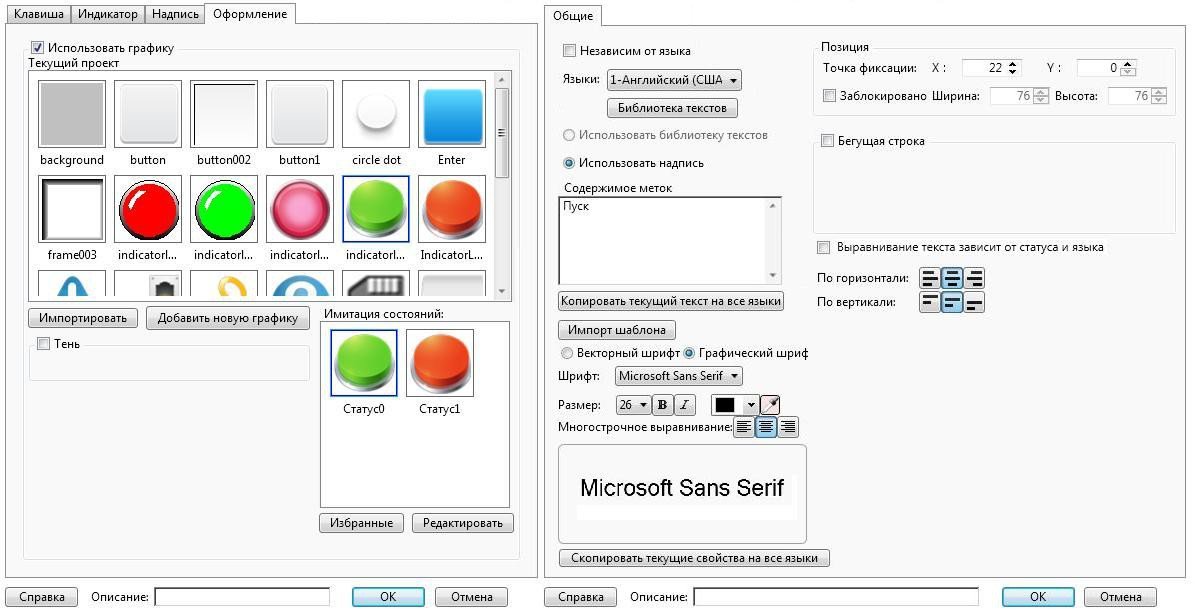
Внешний вид кнопки и её состояний можно задать во вкладке «Оформление». Для удобного расположения подписи рекомендуется в главном меню выбрать «Рисование/текст», поскольку с помощью данного инструмента можно создавать подписи к любым элементам и размещать их с большей степенью свободы, чем при использовании стандартных вкладок «Надпись» в окне редактирования элементов управления. Вкладка «Оформление» и окно элемента «Текст» представлены на рисунке 4.
Кнопка для остановки ПЧ настраивается аналогичным образом, только при указании адреса в окне настроек необходимо выбрать бит 0 в регистре 8193 DEC.
Для задания направления вращения в регистре 8193 DEC предусмотрены биты 2 и 3. При записи в них значений 0 и 1 соответственно происходит запуск двигателя в прямом направлении (FWD). Для смены направления вращения (REV) значения битов нужно изменить на 1 и 0 соответственно. Для управления направлением вращения асинхронного электродвигателя создадим кнопки FWD и REV. Настройка и создание этих кнопок производится аналогично уже созданным кнопкам «Пуск» и «Стоп».
Регулируемые значения удобно задавать, перемещая элемент управления по шкале. Для настройки частоты вращения двигателя создадим «Ползунок». В главном меню выбираем «Компоненты/Ползунок/Ползунок». Во вкладках «Общие» и «Шкала» задаются основные настройки элемента (см. рисунок 5). Во вкладках «Фоновая графика» и «Графика ползунка» задается внешний вид с использованием стандартных или созданных пользователем (импортированных) элементов.
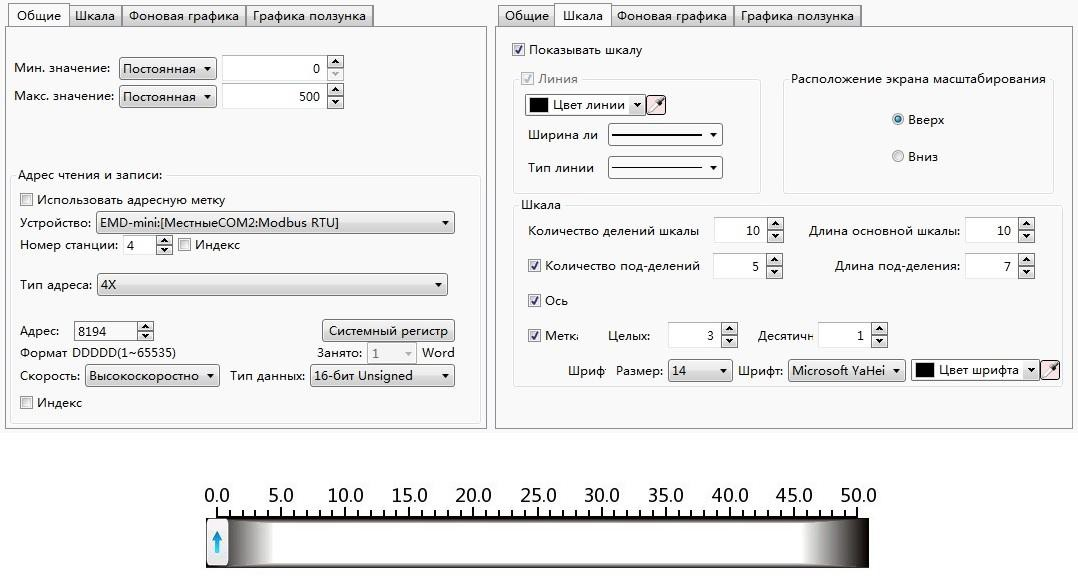
Заданная частота вращения двигателя находится в регистре 8194 DEC. Обратите внимание, что при настройке «Ползунка» верхнее и нижнее значение задается без запятой. Отображение запятой можно задать при настройке шкалы, выбрав количество знаков в параметре «Десятичных:».
Для отображения параметров частоты, силы тока, скорости вращения и напряжения, которым соответствуют адреса регистров 3 DEC, 4 DEC, 5 DEC и 10 DEC (см. таблицу 2), необходимо создать цифровые дисплеи отображения. Для этого следует выбрать «Компоненты/Дисплеи/Цифровой дисплей». Окно создания дисплея отображения значения выходного тока показано на рисунке 6.
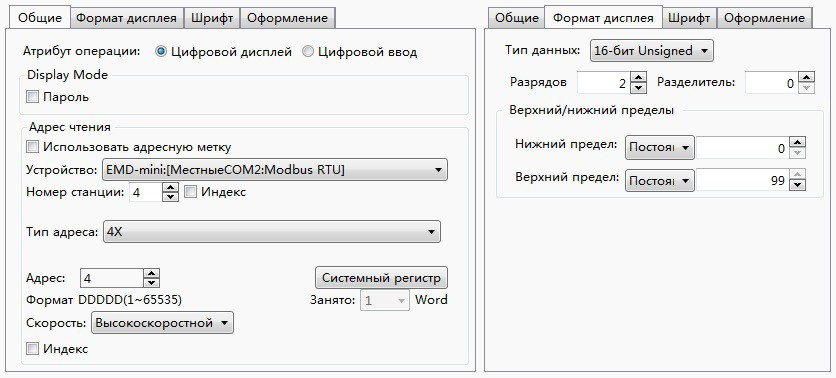
Для перечисленных переменных настройки будут отличаться только адресом чтения и параметрами отображения, которые настраиваются во вкладке «Формат дисплея». Все отображаемые переменные имеют тип данных «16-bit Unsigned». Сила тока и скорость вращения имеют целочисленные значения, а частота и напряжение - дробные (один знак после запятой).
В качестве примера ввода значений можно использовать настройку времени ускорения и замедления двигателя. За эти параметры в ПЧ отвечают регистры с адресами 108 DEC и 109 DEC соответственно. Для создания дисплея ввода значений в главном меню необходимо выбрать «Компоненты/Дисплеи/Ввод цифровых значений». Настройка дисплея ввода ничем не отличается от настройки дисплея отображения, описанной выше. Для параметров времени ускорения и замедления возможна настройка в секундах с точностью до одного знака после запятой (0,1 сек.).
Для оценки изменения напряжения и частоты в процессе управления электродвигателем построим графики U(t) и H(t) на одной координатной плоскости. Для этого необходимо предварительно настроить выборку данных. Для этого в главном меню необходимо выбрать «Настройки/Настройки системы/Сбор данных». После нажатия кнопки «Новый», появится окно настройки свойств выборки данных, представленное на рисунке 7.
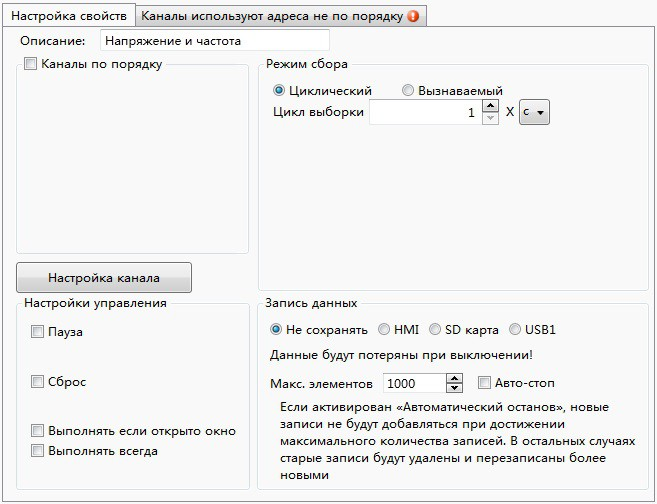
В открывшемся окне нужно снять галочку «Каналы по порядку», так как в данном случае регистры не следуют друг за другом. В правой нижней части окна можно настроить сохранение данных выборки в памяти панели оператора или на внешние носители информации, подключенные к панели оператора. Возможно сохранение данных в CSV формате.
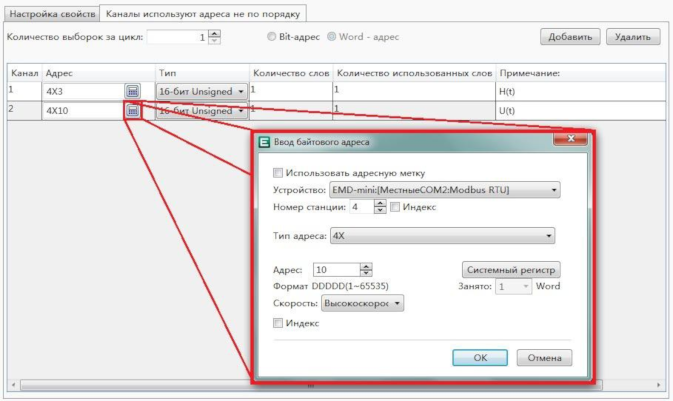
Во вкладке «Каналы используют адреса не по порядку», при нажатии на кнопку «Добавить», формируется таблица выборки данных, в которую необходимо добавить адреса чтения значений напряжения и частоты, регистры 10 и 3 DEC соответственно (рисунок 8).
Далее в главном меню следует выбрать «Компоненты/Графики и диаграммы/Временной тренд». В появившемся окне во вкладке «Общие» необходимо задать настройки (рисунок 9).
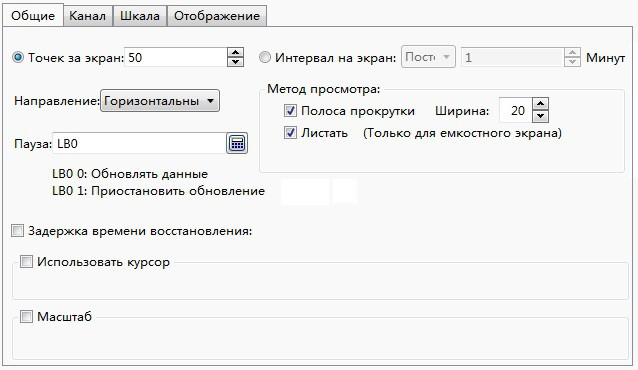
Параметр, определяющий длину отображаемого в текущий момент графика без его смещения по временной шкале, отмечен как «Количество точек на экран». Полоса прокрутки позволяет просматривать более ранние записи при движении графика по временной оси.
Во вкладке «Канал» необходимо выбрать созданный ранее источник данных, «Напряжение и частота», (рисунок 10).
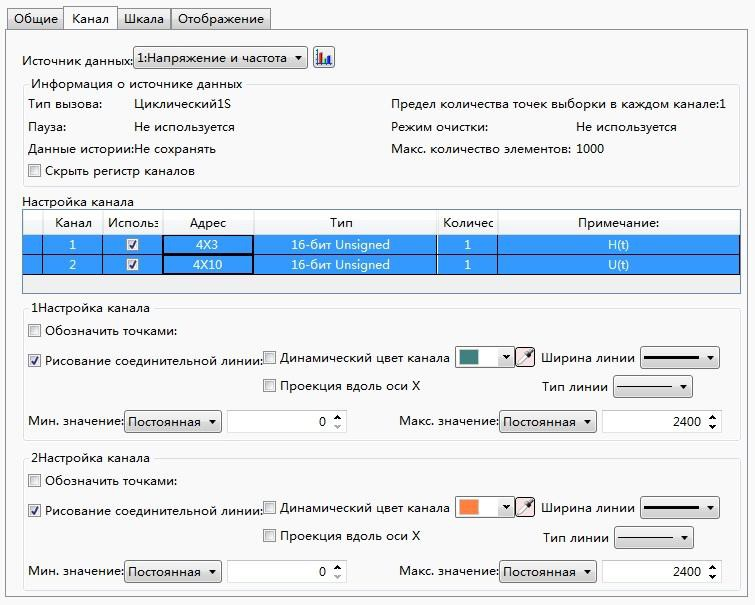
В таблице «Настройка канала», в столбце «Использовать:» необходимо выставить галочки напротив каналов, отображаемых на графике. Кроме того, для каждой переменной необходимо задать цвет и толщину линии. Когда несколько переменных отображаются на одном графике, максимальное значение по каждому из каналов временного тренда должно быть одинаковым. Если это условие не соблюдается, соотношения между значениями на графике будут не корректны. В связи с этим следует установить максимально возможное значение по каналам 2200 (значение напряжения с одним знаком после запятой), учитывая запас 200 для удобства отображения на графике.
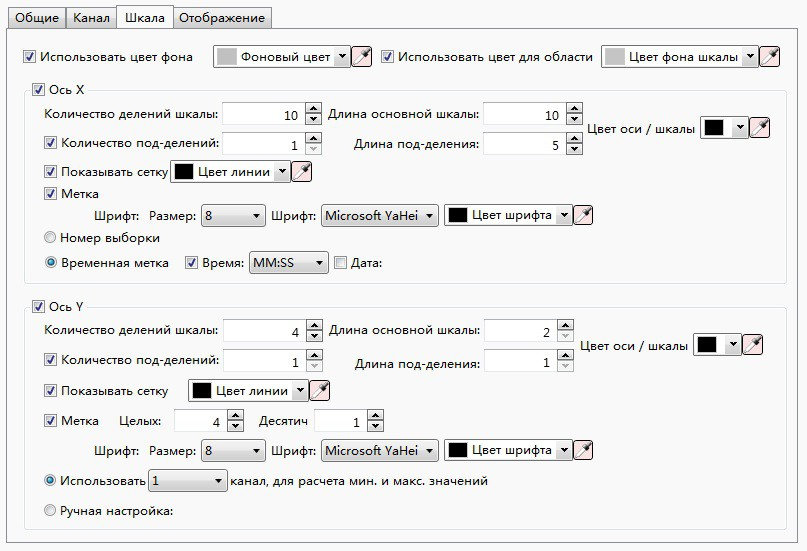
Параметры шкал графика по осям X и Y задаются во вкладке «Шкала». Настройки показаны на рисунке 11.
В итоге, демонстрационная программа для управления двигателем имеет вид, показанный на рисунке 12.
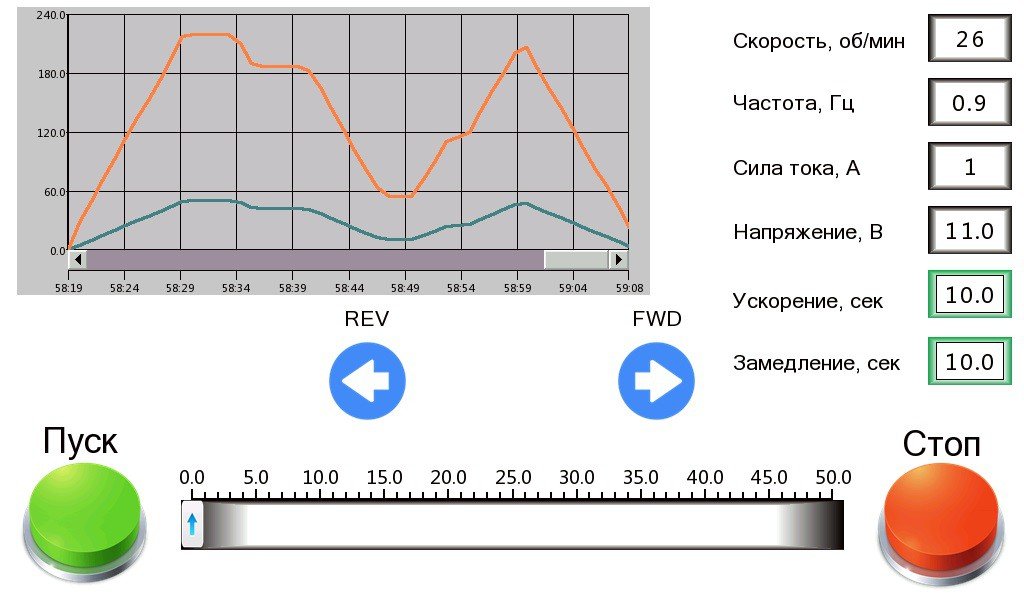
В данной статье был рассмотрен пример связи преобразователя частоты с сенсорной панелью оператора. На основе этого примера могут быть реализованы более сложные алгоритмы управления. Панель оператора открывает широкие возможности для удаленного управления и мониторинга состояния приводной техники.
Инженер ООО «КИП-Сервис»
Руслан М.
Список использованной литературы:
Читайте также:
При добавлении товара возникла ошибка. Пожалуйста, повторите попытку чуть позже.