Содержание:
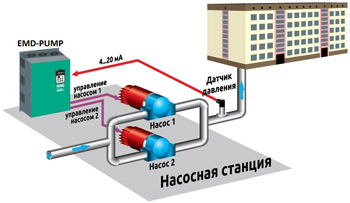
Насосы являются одной из наиболее распространенных технологических машин в различных отраслях промышленности. При их эксплуатации нередко возникают задачи, связанные с необходимостью реализации чередования по времени, например когда на один трубопровод установлено два насоса (основной и резервный), но в работе всегда находится только один. В этом случае, чередование позволяет обеспечить равномерную выработку ресурса каждого и исключить возникновение ситуации когда при выходе основного насоса из строя не запускается резервный по причине долгого простоя. И как правило, данные задачи решаются с помощью сложных систем управления построенных на базе программируемых логических контроллеров (ПЛК) с использованием преобразователей частоты (ПЧ) (см. рисунок 1а). Недостатками данного решения являются: трудность реализации из-за необходимости наличия навыков программирования, большие затраты времени и высокая стоимость конечного результата.
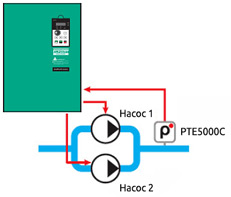
Другой вариант — это применение специализированных преобразователей частоты ELHART серии EMD-PUMP (см. рисунок 1б) у которых уже встроен необходимый для реализации чередования насосов по времени функционал. Применение данных ПЧ позволяет с минимальными усилиями и в кратчайшие сроки собрать схему управления, настроить и запустить оборудование в эксплуатацию без использования внешних устройств.

Периодическое чередование по времени с использованием ПЧ EMD-PUMP может иметь как самую простую реализацию без контроля аварийных состояний и без автоматического ввода резерва (АВР), так и расширенный вариант с контролем аварийных состояний и АВР.
Данный вариант реализации чередования выполняет следующие функции:
1. Регулирование частоты вращения подключенного насоса для поддержания требуемой уставки встроенного ПИД-регулятора.
2. Чередование насосов в соответствии с заданным пользователем интервалом времени.
3. Электрическая защита двигателя (перегрузка по току, перегрузка по моменту, пониженное/повышенное напряжение).
4. Защита от обрыва сигнала обратной связи.
5. Механическая блокировка от одновременного включения двигателей насосов.
Данная реализация чередования требует усложнения электрической схемы управления и применения большего количества оборудования. Благодаря этому появляются дополнительные функциональные возможности:
1. Защита от «сухого хода».
2. Контроль работоспособности насоса по перепаду давления или давлению в выходном трубопроводе.
3. Автоматический ввод резерва при аварии преобразователя частоты либо одного из насосов.
4. Электрическая блокировка от одновременного включения двигателей насосов.
В данной статье будет рассмотрен первый вариант реализации чередования по времени — «без контроля аварийных состояний и без АВР» для двух насосов. Если его функциональных возможностей недостаточно, то следует использовать второй вариант схемы управления, описанный в статье «Реализация чередования насосов по времени с контролем аварийных состояний и с АВР на базе преобразователей частоты ELHART серии EMDPUMP».
ВНИМАНИЕ! К работам по монтажу, наладке, ремонту и обслуживанию технологического оборудования допускаются лица, имеющие техническое образование и специальную подготовку (обучение и проверку знаний) по безопасному производству работ в электроустановках с группой не ниже 2 для ремонтного персонала, а также имеющие опыт работ по обслуживанию оборудования, в конструкцию которого вносятся изменения и дополнения, либо производится модернизация. За неисправность оборудования и безопасность работников при неквалифицированном монтаже и обслуживании ООО «КИП‑Сервис» ответственности не несет.
Регулирование осуществляется в соответствии с сигналом обратной связи, источником которого является датчик давления. Тем самым обеспечивается поддержание заданного давления в обслуживаемой системе. Кроме этого, в качестве регулируемого параметра может использоваться не только давление, но и, например, расход или температура — для этого к EMD-PUMP требуется подключить соответствующий датчик с выходным сигналом 4…20 мА или 0…10 В.
В процессе чередования в любой момент времени в работе находится только один из используемых электродвигателей. Стоит отметить, что этот способ управления позволяет осуществлять чередование большего количества двигателей — до 7 штук. Для этого в схему управления требуется добавить соответствующее количество контакторов и расширить параметры настройки частотного преобразователя.
Функция периодического чередования по времени может быть задействована только в случае использования встроенного в преобразователь частоты ПИД-регулятора. При использовании внешнего ПИД-регулятора функция чередования по времени будет недоступна.
Защита реализуется с помощью встроенных функций ПЧ. При возникновении аварии будет остановлена работа всей схемы управления. Возобновление работы возможно только в ручном режиме, для этого необходимо сбросить аварию преобразователя частоты нажатием на кнопку «СБРОС» на пульте управления.
Запрещается возобновлять работу схемы управления до устранения причины возникновения аварии.
Защита реализуется с помощью встроенных функций ПЧ. Определение обрыва осуществляется по уровню сигнала на аналоговом входе (параметр F6.77 в таблице 2). Реакция на обрыв задается в параметре F6.76.
Блокировка реализуется с помощью механического устройства блокировки К1 (см. рисунок 2).
Для реализации данного алгоритма чередования необходимо оборудование, представленное в таблице 1.
| Изображение | Условное обозначение на схеме | Маркировка | Описание | Количество |
|---|---|---|---|---|
 |
U1 | EMD-PUMP-0055 T * | Преобразователь частоты ELHART (5,5 кВт, 12,5А, 380В, встроенный ПИД-регулятор, каскадный режим, график уставок, поддержание диф. давления, съемный пульт, RS-485 Modbus RTU), серия EMD-PUMP для насосов и вентиляторов | 1 |
 |
B1 | PTE5000C-006-М20-С * | Датчик давления 0…6 бар, точность 0,5%, выход 4…20 мА, М20*1,5 наружная резьба, питание 10…30 V DC, -20 … +100 °С | 1 |
 |
КМ1, КМ2 | LSD01233 * | Контактор АС3 (12 А/5,5 кВт, 3НО, катушка 220VAC, размер 0) | 2 |
 |
К1 | LSZ0W002 * | Механическое устройство блокировки для контакторов LSD размера 0-3 | 1 |
 |
S1 | B200EE | Аварийная кнопка с желт. "STOP" "Грибок" d=40 мм с фикс. и возвратом поворотом (1НЗ) | 1 |
 |
S2 | CP100S20 | Переключатель 0-1 с фикс. 1НО IP65 | 1 |
 |
— | 00000006782 | Кран трехходовой м/м, М20×1,5 внутр. / G1/2 внутр., рабочее давление - 2,5 МПа, макс. - 6,0 МПа, макс. температура – 120 °С | 1 |
 |
— | 00000003129 | Трубка сиф. петлевая прямая внутр. G1/2 / наруж. G1/2 (сталь, 250 бар, 300 °С, длина 360 мм) | 1 |
 |
— | №4 БП-КР-40-G1/2 | Бобышка приварная (штуцер приварной под кран для манометра, высота 40мм, G1/2 наружная, d=21 мм) | 1 |
 |
— | 00000025172 | Прокладка паронитовая G1/2, M20×1,5 | 2 |
* — модификация определяется при заказе.
Установку и подключение оборудования, используемого в данной схеме управления, необходимо осуществлять в соответствии с рекомендациями, приведенными в руководстве по эксплуатации на соответствующий прибор.
На рисунке 2 представлена электрическая схема подключения используемого оборудования.
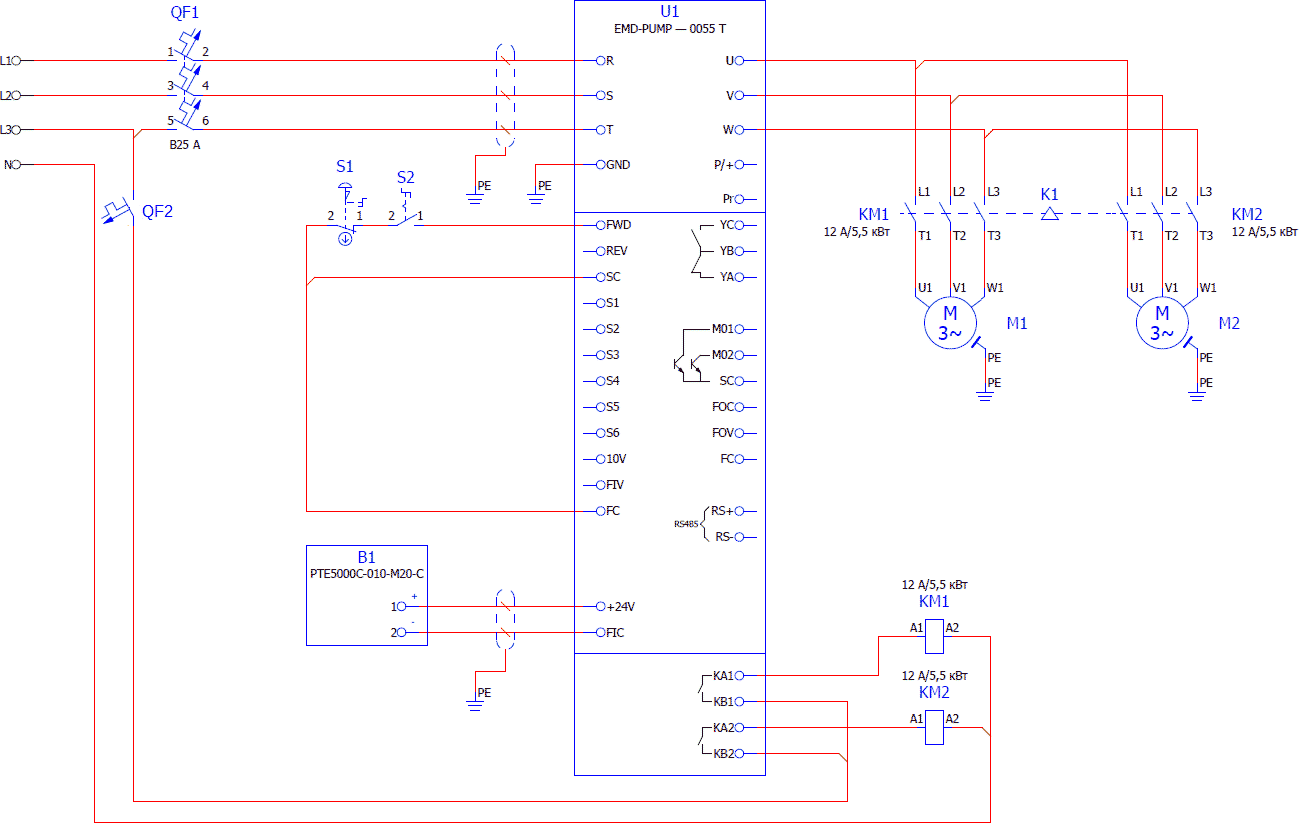
Для использования встроенного блока питания 24 В необходимо объединить «общий вывод для аналоговых сигналов — FC» и «общий вывод для дискретных сигналов — SC» с помощью перемычки, как это показано на рисунке 2.
Настройка преобразователя частоты EMD-PUMP осуществляется в соответствии с таблицей 2.
| Код | Параметр | Описание | Выставленное значение |
|---|---|---|---|
| F1.17 | Установка заводских параметров | Установить заводские параметры | 8 |
| F0.00 | Параметр, отображаемый на дисплее после подачи питания | Сигнал обратной связи ПИД-регулятора | 6 |
| F1.02 | Источник команд управления | Многофункциональные дискретные входы | 1 |
| F1.03** | Блокировка кнопки "STOP" на пульте управления | 0: Кнопка заблокирована 1: Кнопка активна |
- |
| F1.04 | Блокировка вращения назад | Вращение назад запрещено | 0 |
| F1.05** | Максимальная выходная частота | (F1.06)…400,00 Гц, шаг 0,01 Гц | - |
| F1.06** | Минимальная выходная частота | 0,00… (F1.05) Гц, шаг 0,01 Гц | - |
| F1.07** | Время ускорения | 0…6000,0 с, шаг 0,1 с | - |
| F1.08** | Время замедления | 0…6000,0 с, шаг 0,1 с | - |
| F2.01 | Способ остановки двигателя | Остановка на выбеге | 1 |
| F2.10** | Номинальный ток двигателя | 0…номинальный ток ПЧ, шаг 0,1 А | - |
| F3.03 | Минимальный ток на входе FIC | 4 мА | 4 |
| F3.04 | Максимальный ток на входе FIC | 20 мА | 20 |
| F3.15 | Многофункциональный дискретный вход FWD | Вращение в прямом направлении | 6 |
| F4.09** | Ограничение тока при ускорении | 0…200% от значения параметра F2.10 | - |
| F4.16** | Автостарт после подачи питания | 0: Запрещен 1: Разрешен |
- |
| F4.17** | Задержка автостарта после подачи питания | 0…10,0 с | - |
| F4.22 | Реакция на превышение тока | Активна всегда: при превышении тока ПЧ отключается | 3 |
| F4.23** | Уровень превышения тока | 0…200% от значения параметра F2.10 | - |
| F4.24** | Время обнаружения превышения тока | 0…9,0 (выбранное значение необходимо умножить на 200 мс) | - |
| F6.00 | Включение ПИД-регулятора | Включен | 1 |
| F6.01 | Тип обратной связи ПИД-регулятора | Отрицательная обратная связь | 0 |
| F6.02 | Источник задания уставки ПИД-регулятора | Потенциометр на пульте управления ПЧ | 3 |
| F6.03 | Источник обратной связи ПИД-регулятора | Аналоговый сигнал на входе FIC | 1 |
| F6.20 | Релейный выход КА1, КВ1 | Двигатель 1 работает от ПЧ | 2 |
| F6.21 | Релейный выход КА2, КВ2 | Двигатель 2 работает от ПЧ | 4 |
| F6.22 | Релейный выход КА3, КВ3 | Не используется | 0 |
| F6.23 | Релейный выход КА4, КВ4 | Не используется | 0 |
| F6.24 | Релейный выход КА5, КВ5 | Не используется | 0 |
| F6.25 | Релейный выход КА6, КВ6 | Не используется | 0 |
| F6.26 | Релейный выход КА7, КВ7 | Не используется | 0 |
| F6.27 | Релейный выход КА8, КВ8 | Не используется | 0 |
| F6.28** | Установка времени, секунды | 0…60 с | - |
| F6.29** | Установка времени, минуты | 0…60 мин | - |
| F6.30** | Установка времени, часы | 0…24 час | - |
| F6.31** | Установка даты, дни | 1…31 день | - |
| F6.32** | Установка даты, месяцы | 1…12 мес | - |
| F6.33** | Установка даты, год | 0…99 год | - |
| F6.34 | Режим работы двигателя 1 | Работа от преобразователя частоты | 1 |
| F6.35 | Режим работы двигателя 2 | Работа от преобразователя частоты | 1 |
| F6.36 | Режим работы двигателя 3 | Не используется | 0 |
| F6.37 | Режим работы двигателя 4 | Не используется | 0 |
| F6.38 | Режим работы двигателя 5 | Не используется | 0 |
| F6.39 | Режим работы двигателя 6 | Не используется | 0 |
| F6.40 | Режим работы двигателя 7 | Не используется | 0 |
| F6.43 | Время задержки включения следующего двигателя в каскадном режиме | 0…3600,0 с, шаг 0,1 с | 0 |
| F6.47 | Время задержки отключения следующего двигателя в каскадном режиме | 0…3600,0 с, шаг 0,1 с | 0 |
| F6.49** | Задержка перед запуском двигателя после подключения к ПЧ | 0…10,0 с, шаг 0,1 с | - |
| F6.51** | Время чередования двигателей | 0…65535 мин, шаг 1 мин | - |
| F6.68 | Возможность ухода в спящий режим | Активна | 255 |
| F6.69** | Допустимое отклонение сигнала обратной связи от уставки для перехода в спящий режим | 0…25% | - |
| F6.70** | Время задержки перехода в спящий режим | 0…3600,0 с, шаг 0,1 с | - |
| F6.71** | Частота перехода в спящий режим | 0…(F1.05) Гц | - |
| F6.73** | Допустимое отклонение сигнала обратной связи от уставки для выхода из спящего режима | 0…25,0% | - |
| F6.74** | Время задержки выхода из спящего режима | 0…3600,0 с, шаг 0,1 с | - |
| F6.76 | Отслеживание обрыва сигнала на аналоговом входе FIC | Остановка двигателя с ручным сбросом аварии | 2 |
| F6.77 | Нижний уровень сигнала на входе FIC | 3 мА | 3.0 |
| F6.78 | Время задержки аварии по обрыву сигнала на входе FIC | 10 с | 10.0 |
| F1.18** | Блокировка изменения параметров | 0: Блокировка не установлена 1: Блокировка установлена |
- |
** — значение параметра задается в соответствии с условиями/требованиями технологического процесса и допустимым режимом работы оборудования.
Следует понимать, что приведенные параметры настройки не могут быть унифицированы под любое применение. В каждом конкретном случае будут присутствовать свои ограничения, накладывающие определенные условия на режим работы оборудования. Поэтому, в процессе настройки преобразователя частоты, пользователь должен самостоятельно задать значения параметров со знаком «**» в таблице 2:
1. Значения параметров F1.05 (минимальная выходная частота) и F1.06 (максимальная выходная частота) должны соответствовать не только требованиям технологического процесса, но и допустимому пределу регулирования скорости вращения насоса, указанному в руководстве по эксплуатации. В частности, область оптимальной и экономически выгодной работы для большинства центробежных насосов находится в диапазоне частот от 25 Гц до 50 Гц.
2. Значения параметров F1.07 (время разгона) и F1.08 (время торможения) должны выбираться, исходя из условия обеспечения плавного запуска и остановки насоса для исключения возникновения гидроударов в системе, а также перегрузки электродвигателя и преобразователя частоты. Даже для одинаковых моделей насосов это время может различаться в зависимости от конфигурации гидравлической системы. Также следует упомянуть, что включение режима токоограничения может способствовать увеличению времени разгона. Если выходной ток преобразователя частоты достигнет установленного в параметре F4.09 значения, разгон прекратится до того момента, пока ток не начнет снижаться. В случае превышения уровня токоограничения ПЧ начнет торможение, которое будет продолжаться до момента, пока значение тока не станет ниже уровня токоограничения. После этого разгон возобновится.
3. При настройке параметров токовой защиты F4.23 и F4.24 следует опираться на допустимый уровень перегрузки ПЧ и электродвигателя. К примеру, преобразователи частоты серии EMD-PUMP допускают перегрузку 120% от номинального выходного тока в течение 60 секунд. Если электродвигатель допускает большую перегрузку, токовая защита должна быть ограничена на уровне 120% от номинального тока ПЧ.
4. При необходимости автоматического запуска насоса после пропадания питания следует задействовать функцию «Автостарт после подачи питания», которая настраивается параметрами F4.16 (включение автостарта) и F4.17 (задержка перед автостартом). Если данная функция не задействована, для запуска насоса после пропадания питания необходимо осуществить сброс и повторную подачу сигнала «Пуск» на дискретный вход FWD.
Не используйте данную функцию при нестабильном питающем напряжении.
5. Функция «спящий режим» позволяет останавливать насос в моменты, когда его работа экономически нецелесообразна (например, при низком уровне водопотребления). После возобновления потребления воды произойдет повторный запуск насоса и регулирование частоты вращения продолжится. Включение/выключение «спящего режима» осуществляется с помощью параметра F6.68, а условия входа/выхода из него задаются в параметрах F6.69 – F6.74.
Для описания алгоритма необходимо воспользоваться электрической схемой подключения (рисунок 3) и циклограммой работы (рисунок 4).
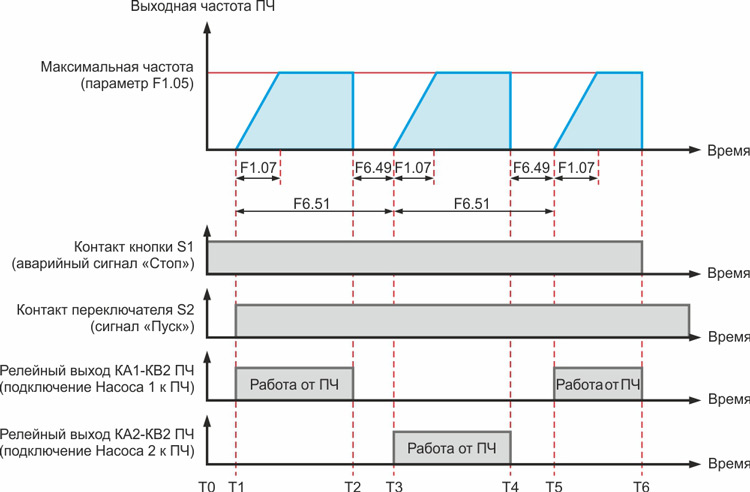
Высокий уровень сигнала на рисунке 4 соответствует замкнутому состоянию контактов на рисунке 3.
Упрощенно работа подключенного к преобразователю частоты насоса показана как разгон до максимальной частоты вращения (параметр F1.05) и непрерывная работа на этой частоте до осуществления переключения.
Алгоритм работы схемы описан в таблице 3.
| Интервал времени | Комментарии |
|---|---|
| Т0-Т1 |
|
| Т1-Т2 |
|
| Т2-Т3 |
|
| Т3-Т4 |
|
| Т4-Т5 |
|
| Т5-Т6 |
|
| Т6-Т ∞ |
|
В статье был рассмотрен самый простой способ периодического чередования двух насосов по времени осуществляющий следующие функции:
1. Регулирование частоты вращения подключенного насоса для поддержания требуемой уставки встроенного ПИД-регулятора.
2. Чередование насосов в соответствии с заданным пользователем интервалом времени.
3. Электрическая защита двигателя (перегрузка по току, перегрузка по моменту, пониженное/повышенное напряжение).
4. Защита от обрыва сигнала обратной связи.
5. Механическая блокировка от одновременного включения двигателей насосов.
Данный вариант схемы управления требует минимального комплекта оборудования и позволяет решать базовые задачи управления насосами. Однако есть применения, для которых описанного функционала недостаточно и дополнительно требуется:
1. Защита насоса от «сухого хода».
2. Контроль работоспособности насоса по перепаду давления или давлению в выходном трубопроводе.
3. Автоматический ввод резерва при аварии преобразователя частоты либо одного из насосов.
Если наличие этих функций обязательно, то необходимо воспользоваться схемой управления описанной в статье «Реализация чередования насосов по времени с контролем аварийных состояний и с АВР на базе преобразователей частоты ELHART серии EMD-PUMP».
Инженер ООО «КИП-Сервис»
Александр П.
Список использованной литературы:
При добавлении товара возникла ошибка. Пожалуйста, повторите попытку чуть позже.