Содержание:
В данной статье рассмотрено подключение преобразователя частоты к программируемому логическому контроллеру. Существует два основных варианта подключения: с использованием дискретных и аналоговых сигналов или по цифровому интерфейсу. Достоинством первого варианта является универсальность подключения (как правило разные преобразователи частоты имеют одинаковый набор основных управляющих сигналов) и отсутствие необходимости изменять программу на ПЛК при замене модели ПЧ. Однако, для реализации подключения необходимо задействовать входы и выходы контроллера, что делает схему подключения более сложной, а также приводит к удорожанию системы.
В свою очередь, подключение по цифровому интерфейсу производится при помощи одного кабеля. При этом пользователю доступны более широкие возможности работы с ПЧ (опрос аварийных сигналов, удаленная настройка параметров ПЧ и так далее).
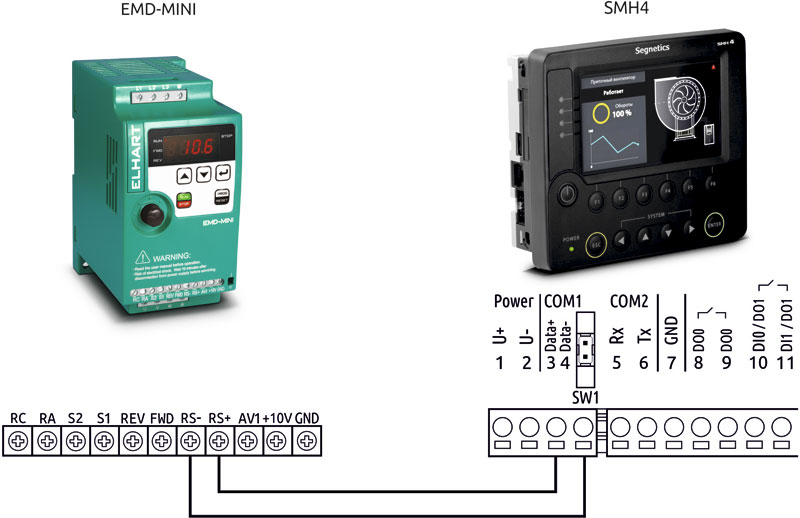
В статье рассмотрен второй способ на примере подключения ПЧ ELHART EMD-MINI к контроллеру Segnetics SMH4 по цифровому интерфейсу RS-485 (протокол Modbus RTU).
ВНИМАНИЕ! К работам по монтажу, наладке, ремонту и обслуживанию технологического оборудования допускаются лица, имеющие техническое образование и специальную подготовку (обучение и проверку знаний) по безопасному производству работ в электроустановках с группой не ниже 2 для ремонтного персонала, а также имеющие опыт работ по обслуживанию оборудования, в конструкцию которого вносятся изменения и дополнения, либо производится модернизация. За неисправность оборудования и безопасность работников при неквалифицированном монтаже и обслуживании ООО «КИП‑Сервис» ответственности не несет.
Подключение производится по двухпроводной схеме. Клеммы 3 (Data+) и 4 (Data-) контроллера подключаются к клеммам RS+ и RS- преобразователя соответственно.
В преобразователе частоты необходимо установить параметры согласно таблице 1.
| Параметр | Значение | Описание |
|---|---|---|
| P101 | 5 | Источник задания выходной частоты — интерфейс RS-485 |
| P102 | 2 | Источник команд управления — интерфейс RS-485 |
| P700 | 1 | Скорость передачи данных — 9600 бод* |
| P701 | 3 | Формат данных — 8,N,1, протокол Modbus RTU* |
| P702 | 1 | Адрес преобразователя частоты - 1** |
* Скорость передачи данных и формат данных должны быть установлены одинаковыми на всех устройствах, находящихся в сети.
** Каждому устройству в сети должен быть задан уникальный адрес в диапазоне 0...240. Если Р702=0, то обмен по RS-485 отключен.
Основные используемые регистры представлены в таблице 2.
| Параметр | Описание | Функция | Адрес (Hex) | |
|---|---|---|---|---|
| Команды управления ПЧ (Р102 = 2) | bit1∼bit0 | 00B: нет действия 01B: Стоп 10B: Пуск 11B: работа на частоте JOG |
Чтение запись |
2000h |
| bit3∼bit2 |
00B: нет действия 01B: вращение в обратном направлении 10B: вращение в прямом направлении 11B: сменить направление вращения |
|||
| bit4 |
0B: нет действия 1B: сброс аварии |
|||
| Задание выходной частоты (Р101 = 5) | Диапазон 0…9999 (0…999,9 Гц) | Чтение запись |
2001h | |
| Информация по авариям ПЧ (Р027) |
bit0 Перегрузка по току UC bit1 Перегрузка по току OC bit2~bit3 Зарезервировано bit4 Повышенное напряжение OU bit5 Зарезервировано bit6 Пониженное напряжение LU bit7 Перегрузка ПЧ OL bit8 Перегрузка двигателя OT bit9 Перегрев ПЧ OH bit10 Отсутствие сигнала на входе AVI 20 bit11 Ошибка связи CO bit12~bit14 Зарезервировано bit15 Индикация аварии |
Чтение | 001Bh | |
| Мониторинг состояния ПЧ (Р028) | bit0 bit1 |
0В: прямое направление вращения 1В: обратное направление вращения 0B: Стоп 1B: Пуск |
Чтение | 001Ch |
| Текущая выходная частота | Диапазон 0…9999 (0…999,9 Гц) | Чтение | 0002h | |
| Состояние дискретных входов и выходов |
bit0 вход FWD bit1 вход REV bit2 вход S1 bit3 вход S2 bit8 Заданная частота достигнута bit9 дискретный выход bit10 ПЧ работает (режим RUN) |
Чтение | 0016h | |
Любой параметр ПЧ можно считать по протоколу Modbus. Адрес параметра соответствует номеру параметра в шестнадцатеричном формате. Пример: параметр P422 = 422 в десятичном формате (dec) = 01А6 в шестнадцатеричном формате (hex).
Настройка и программирование контроллера SMH4 производится в программе SMLogix.
Для связи используется порт контроллера COM1, интерфейс RS-485, протокол ModBUS RTU.
При создании нового проекта сразу после выбора типа контроллера открывается окно «Свойства контроллера» (также это окно можно открыть, если во вкладке «Устройства», находящейся с левой стороны экрана, выполнить двойной клик на строке с именем устройства.)
В разделе «Сетевые интерфейсы» во вкладке «COM1» требуется задать параметры сети, адрес устройства и поставить галочку «загрузить с проектом».
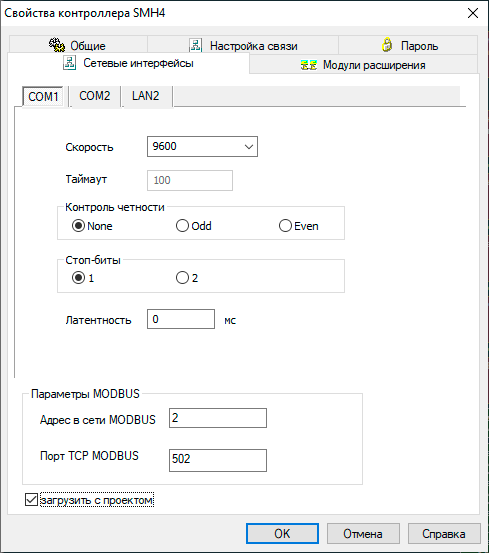
Сетевые параметры, приведенные на рисунке 2, соответствуют параметрам, заданным в ПЧ (см. таблицу 1).
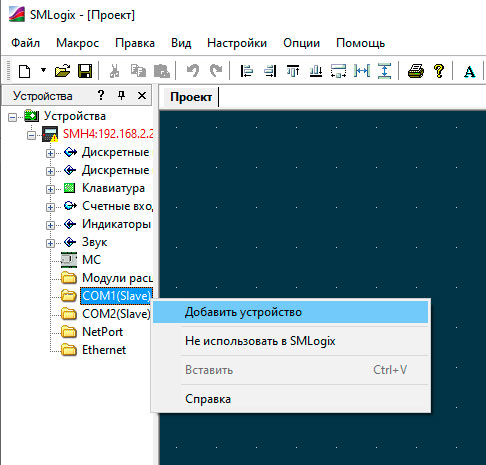
Для добавления Slave-устройства необходимо правым кликом мыши на строке «COM1(Slave)» открыть контекстное меню и выбрать «Добавить устройство» (см. рисунок 3).
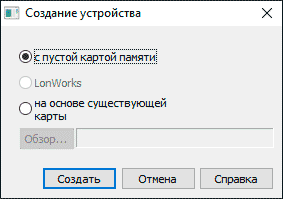
В данном примере рассмотрено создание устройства с пустой картой памяти (см. рисунок 4). Также можно воспользоваться картой устройства, представленной в данной статье (ссылка для скачивания файла доступна в конце статьи). При использовании ранее написанной карты необходимо выбрать пункт «на основе существующей карты» и указать путь к имеющейся карте памяти slave-устройства.
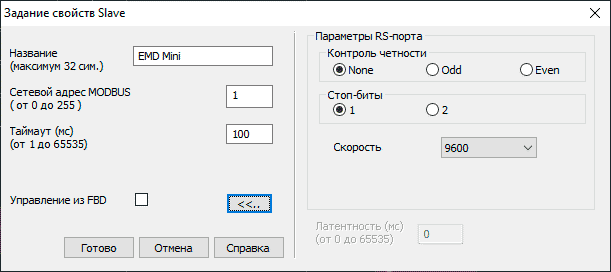
Свойства Slave-устройства необходимо задать согласно рисунку 5.
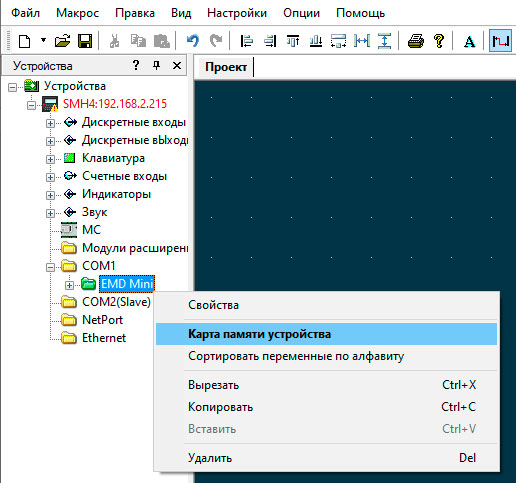
Для создания карты памяти необходимо правым кликом мыши на строке с именем добавленного Slave-устройства открыть контекстное меню и выбрать «Карта памяти устройства» (см. рисунок 6).
Кнопкой «Добавить» необходимо создать требуемое количество переменных, указав для каждой имя, тип (все переменные integer), направление (для всех переменных необходимо выбрать R/W (out)).
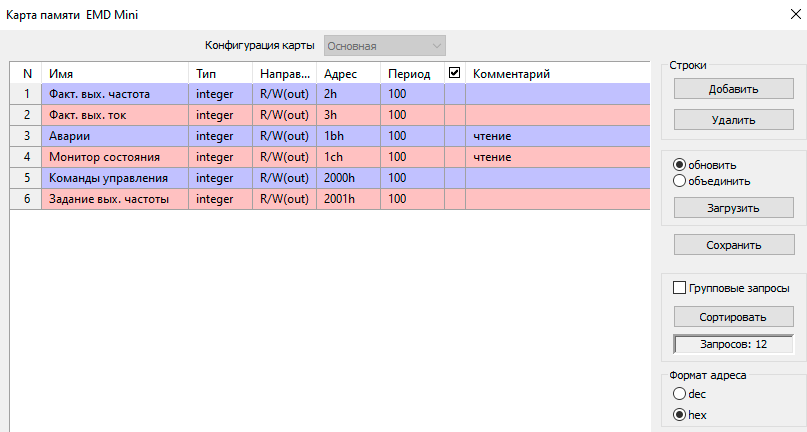
Для удобства задания адреса переменных необходимо выбрать «hex» в поле «Формат адреса» (рисунок 7.1). В этом случае адрес будет выглядеть так же, как и в руководстве на ПЧ.
ПЧ EMD-MINI не поддерживает режим «групповых запросов». Поэтому данный режим необходимо отключить, убедившись в отсутствии галочки (рисунок 7.1).
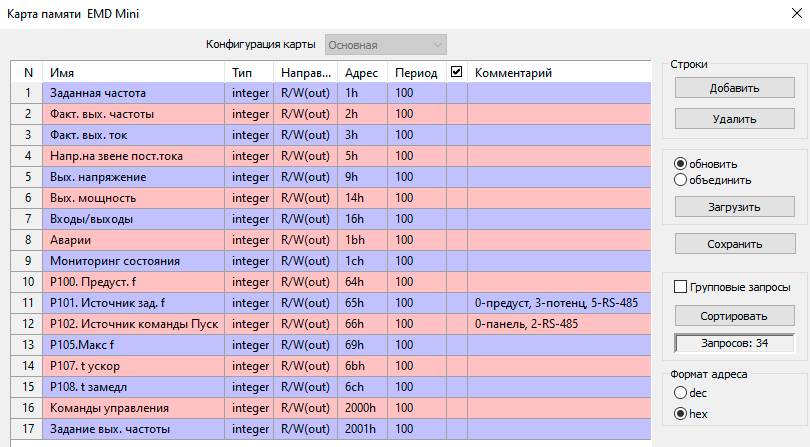
На рисунках 7.1 и 7.2 представлены две карты памяти: краткая (используемая в статье) и расширенная (с большим количеством переменных).
Функции управления находятся в регистре 2000h. Каждый бит регистра выполняет свою функцию.
Кодирование битов в число типа «int» производится с помощью блока преобразования «bool->int» (раздел «Преобразования типов»).
Необходимо перетащить блок на рабочее поле и в его свойствах задать 5 входов (см. рисунок 8).
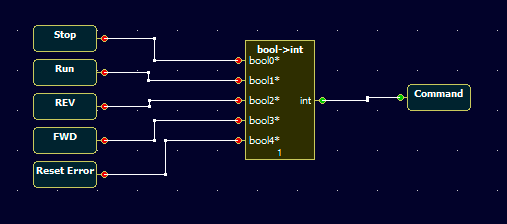
Для удобства блок можно преобразовать в макрос «Управление ПЧ», создав понятные имена входов и выхода.
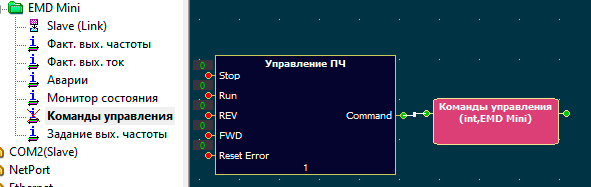
Созданные в карте памяти сетевые переменные расположены во вкладке «Устройства» (см. рисунок 9).
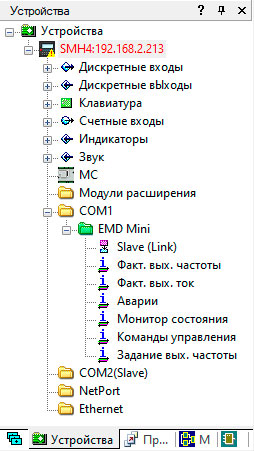
Чтобы задействовать сетевую переменную, требуется переместить ее на рабочее поле (нажав на переменную, а затем на свободное место на рабочем поле).
Выход макроса «Управление ПЧ» необходимо соединить с сетевой переменной «Команды управления» (см. рисунок 10).
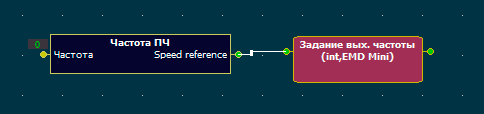
Дискретность задания частоты для ПЧ EMD-Mini составляет 0,1 Гц. Следовательно, в регистр задания выходной частоты (см. рисунок 12) необходимо записывать число в 10 раз больше требуемой частоты. Для удобства задания можно сделать макрос «Частота ПЧ», представленный на рисунке 11.

Созданный макрос «Частота ПЧ» необходимо соединить с сетевой переменной «Задание выходной частоты».
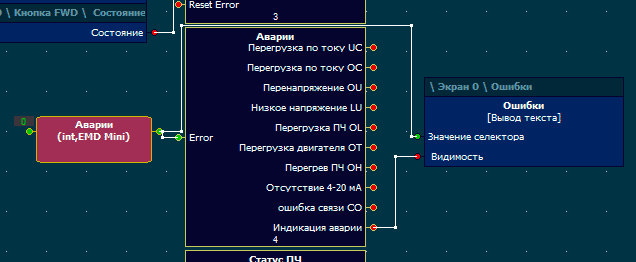
За каждый тип аварии отвечает определенный бит регистра 001Bh (см. Таблицу 2).
Для обработки регистра аварий необходимо воспользоваться блоком «reg16‑>bits» (раздел «Преобразования типов») (рисунок 13).
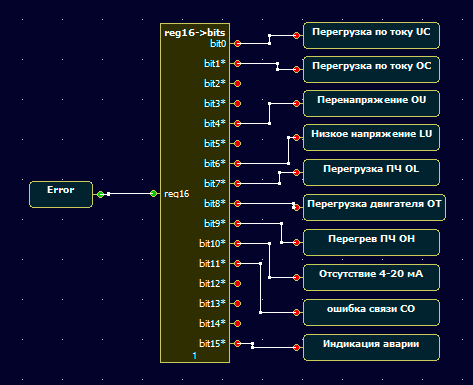
Бит 15 отвечает за индикацию аварии на дисплее ПЧ. Если авария появилась — бит равен «1». Если причина аварии ушла – бит сохраняет состояние до ручного сброса аварии или перезапуска ПЧ.
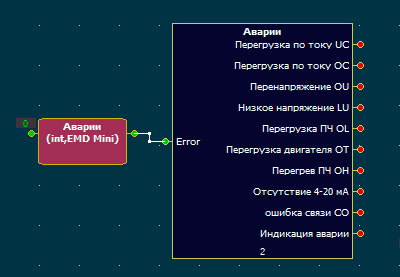
Для удобства блок можно преобразовать в макрос «Аварии», создав понятные имена входа и выходов. Вход макроса необходимо соединить с сетевой переменной «Аварии» (рисунок 14).
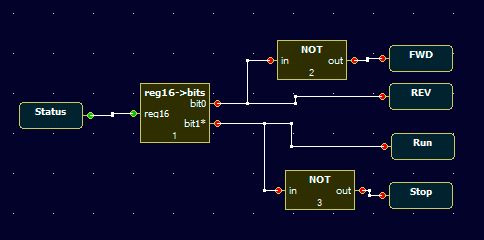
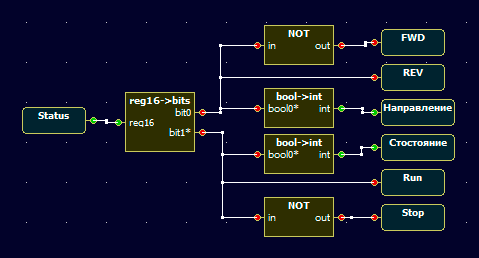
Информация о состоянии преобразователя частоты зашифрована в первых двух битах регистра 001Ch. Регистр необходимо обработать аналогичным образом (см. пункт 3.4.3 и рисунок 15).
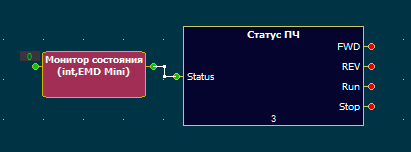
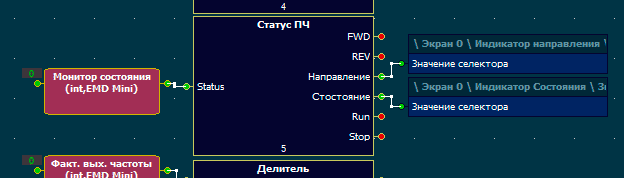
Созданный макрос «Статус ПЧ» представлен на рисунке 16.
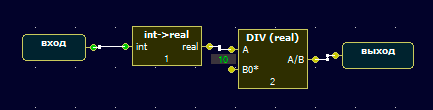
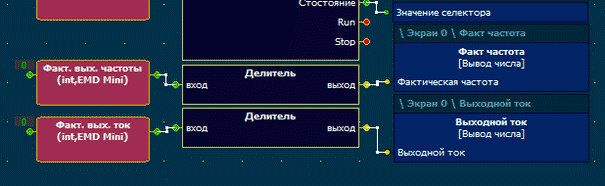
Регистр 0002h содержит информацию о фактической выходной частоте. Дискретность выходной частоты для ПЧ EMD-Mini составляет 0,1 Гц. Следовательно, полученное число в 10 раз больше фактической частоты. Для удобства считывания и дальнейшей обработки можно сделать макрос «Делитель», представленный на рисунке 17.
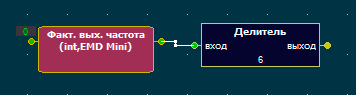
Ко входу макроса «Делитель» необходимо подключить сетевую переменную «Факт.вых.частота» (рисунок 18).
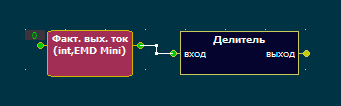
Регистр 0003h содержит информацию о фактическом выходном токе ПЧ. Эти данные можно считать таким же образом, как и в пункте 3.4.5 (см. рисунок 19).
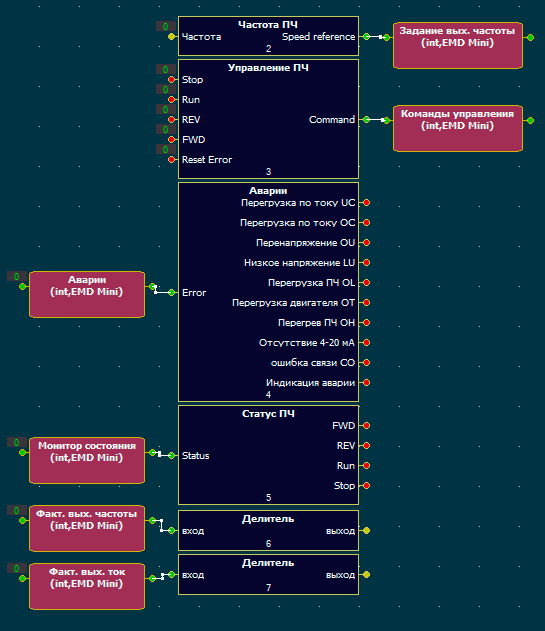
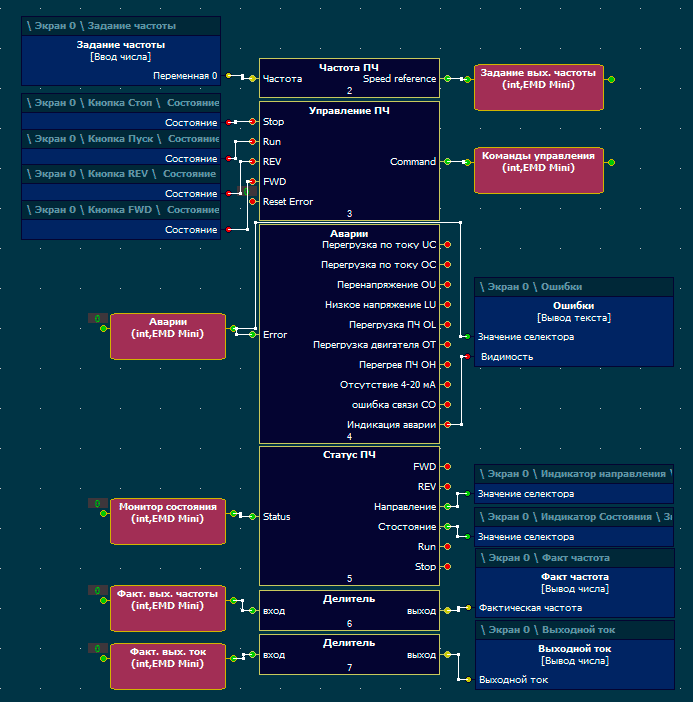
Результатом выполнения действий, описанных в пунктах 3.4.1-3.4.6 является программа, представленная на рисунке 20.
Для работы с экраном контроллера необходимо воспользоваться встроенной в SMLogix инструментальной средой SMArt.
Для входа в среду требуется нажать соответствующую кнопку, которая находится на панели инструментов (см. рисунок 21).
В данном примере, для удобства восприятия информации в левой части экрана будут располагаться элементы управления, а в правой — элементы состояния.
Все подписи выполняются элементом «Текст» (рисунок 22). В данном примере это «Управление», «Состояние», «Фактическая частота», «Фактический ток».
Для вывода на экран фактической частоты и тока требуется добавить на экран элементы «Вывод числа» (рисунок 23).
Для удобства работы с элементами каждой переменной присваивается имя (рисунок 24).
В настройках переменных элементов ввода и вывода числа требуется выбрать тип «R», знакомест «2» до запятой и «1» после (рисунок 25).
Для задания частоты необходимо добавить блок «Ввод числа» (рисунок 26).
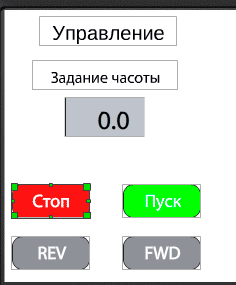
Управление состоянием реализуется добавлением на экран четырех кнопок: «Стоп», «Пуск», «REV» «FWD» (рисунок 27).
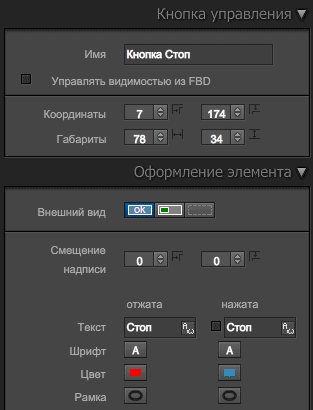
Каждой кнопке присваивается имя, которое будет отображено при программировании в среде SMLogix. В разделе «Оформление переменной» необходимо задать текст для отжатого и нажатого состояния кнопок. Для удобства можно задать цвет в каждом состоянии (рисунок 28).
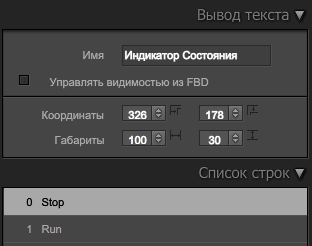
Для индикации состояния ПЧ также используются элементы «Текст» (рисунок 29).
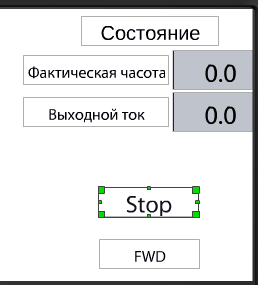
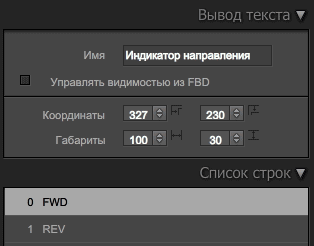
Каждому элементу необходимо задать имя.
Состояние ПЧ и направление вращения определяются состоянием соответствующих бит. Бит состояния может принимать 2 значения: 0 (Stop) и 1 (Run) (рисунок 30).
Бит направления вращения может принимать 2 значения: 0 (FWD) и 1 (REV) (рисунок 31).
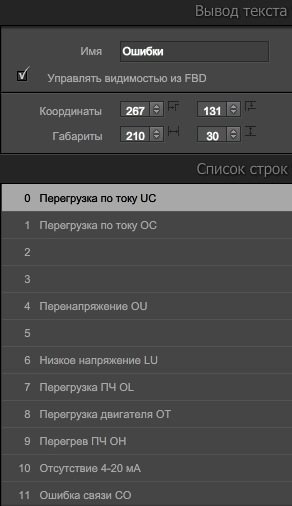
Для вывода на экран аварийных ситуаций на экран добавляется элемент «Текст» (рисунок 32).
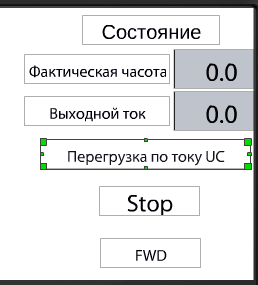
Чтобы элемент не отображался при отсутствии ошибок необходимо в параметрах объекта установить галочку «Управлять видимостью из FBD».
За каждый тип аварии отвечает определенный бит регистра 001Bh.
В соответствии с номером бита и названием аварии заполняются строчки (рисунок 33).
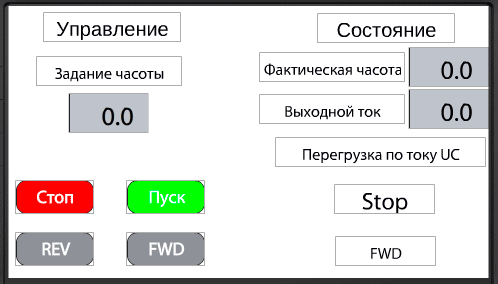
В результате должна получится визуализация, представленная на рисунке 34.
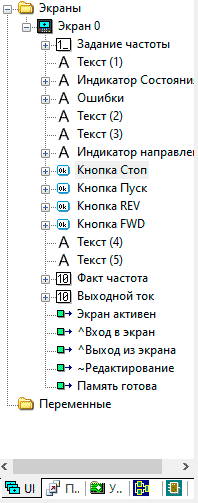
Для связывания визуальной части (сделанной в SMArt) и программы ПЛК (FBD-проекта) служат переменные, которые находятся в UI-проводнике (рисунок 35).
Элемент «Задание частоты» необходимо переместить на рабочее поле и соединить с входом макроса «Частота ПЧ» (рисунок 36).

К макросу «Управление ПЧ» необходимо подключить ранее созданные в SMArt кнопки «Стоп», «Пуск», «REV» «FWD» (их также необходимо переместить из UI-проводника) (рисунок 37).
Для обработки регистра аварий ко входу «Значение селектора» элемента «Ошибки» необходимо подключить сетевую переменную «Аварии», а ко входу «Видимость» подключить выход «Индикация аварии» макроса «Аварии» (см. рисунок 38).
Для подключения индикаторов «Состояние ПЧ» и «Направление вращения» необходимо обработать сигнал сетевой переменной «Монитор состояния», выделив из него требуемые биты (блоком «reg16‑>bits» (раздел «Преобразования типов»).
Состояние битов из типа bool нужно преобразовать в int с помощью блока «bool->int» (раздел «Преобразования типов»).
Чтобы не загромождать рабочее поле можно модернизировать макрос «Статус ПЧ» (рисунок 39).
К обновленному макросу требуется подключить индикаторы «Состояние ПЧ» и «Направление вращения» (рисунок 40).
Для отображения фактической частоты и выходного тока необходимо подключить блоки к соответствующим макросам (рисунок 41).
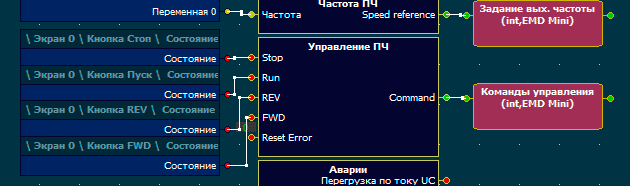
В результате, программа должна приобрести вид, показанный на рисунке 42.
Для проверки программы необходимо загрузить программу к контроллер и включить режим отладки. Для этого необходимо нажать соответствующую кнопку (см. рисунок 43).
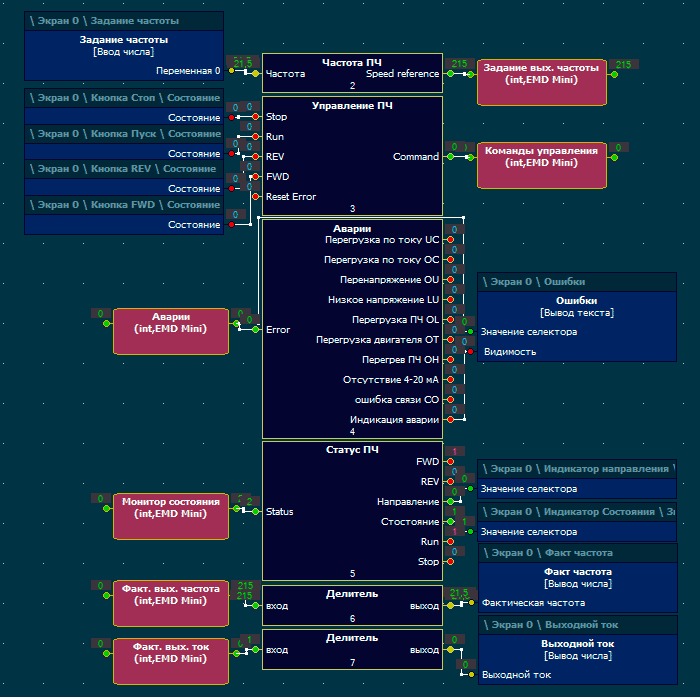
Во время отладки на входах и выходах блоков и макросов отображаются текущие значения.
В режиме отладки программа имеет вид, представленный на рисунке 44.
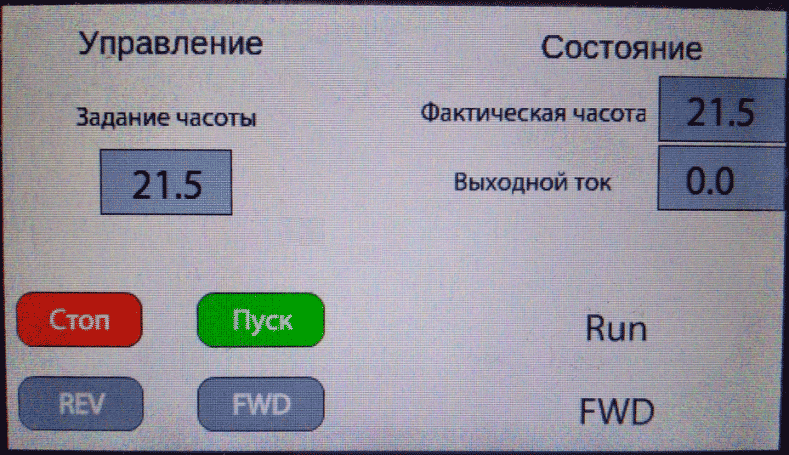
Экран контроллера в режиме отладки представлен на рисунке 45.
Для отключения режима отладки необходимо нажать соответствующую кнопку (см. рисунок 46).
В данной статье описана процедура организации управления преобразователем частоты ELHART EMD-Mini с помощью программируемого логического контроллера Segnetics SMH4. На основе данного примера можно сделать собственные, более сложные алгоритмы управления преобразователем.
Инженер ООО «КИП-Сервис»
Максим Р.
Список использованной литературы:
При добавлении товара возникла ошибка. Пожалуйста, повторите попытку чуть позже.