Содержание:
Многие задачи автоматизации технологических процессов в той или иной мере требуют плавного изменения параметров рабочей среды. Это может быть поддержание нужного расхода теплоносителя на входе в теплообменник, или заданного давления воздуха внутри рабочей камеры пневмоцилиндра для регулировки усилия прижима, или поддержание соотношения газ/воздух при подаче топлива в горелку котла и т. д. Эти и многие другие задачи требуют применения регулирующих клапанов для их решения.
Одним из наиболее распространённых типов регулирующих клапанов являются клапаны с электроприводом и трёхпозиционным управлением, который в народе часто называют «больше/меньше». Данный способ управления характеризуется наличием трёх состояний клапана: открывается (сигнал «больше»), закрывается (сигнал «меньше») и не изменяет состояния (оба сигнала: и «больше» и «меньше» отсутствуют).
Электроприводы с таким способом управления применяются как совместно с запорно-регулирующими клапанами (линейное перемещение рабочего органа), так и совместно с регулирующими шаровыми кранами или заслонками (поворот рабочего органа). В обои случаях принцип работы электропривода одинаковый: подача одного из сигналов «больше» или «меньше» приводит к вращению электромотора в различных направлениях, а редуктор преобразует это вращение в линейное (для клапанов) или поворотное (для кранов) движение. При этом необходимость обеспечения высокого выходного момента заставляет использовать редукторы с большим передаточным отношением, что приводит к уменьшению скорости работы привода.
Время полного хода регулирующих клапанов с электроприводом составляет, как правило, от нескольких десятков до нескольких сотен секунд. Для многих медленно протекающих процессов быстродействие не является критичным и на первый план при выборе выходят цена и общая надёжность конструкции. Примером таких процессов может служить задача поддержания температуры в контурах отопления или горячего водоснабжения в индивидуальных тепловых пунктах (ИТП).
.jpg)
Использование клапанов с электроприводом и управлением «больше/меньше» требует применения специальных регуляторов. Однако, данные регуляторы не являются редкостью, а их настройка не вызывает больших трудностей, так что этот факт следует отнести скорее к особенностям таких клапанов, а не к их недостаткам.
Впрочем, некоторые процессы для качественного управления требуют быстродействующих клапанов со временем полного хода не более нескольких секунд. Примерами таких процессов могут служить пастеризационно-охладительные установки (ПОУ) или уже упоминаемый процесс поддержания оптимального соотношения газ/воздух. Для решения этих задач используют клапаны с пропорциональным способом управления и одними из наиболее распространённых клапанов такого типа являются клапаны с мембранным исполнительным механизмом (МИМ).

В качестве входного сигнала управления, определяющего положение рабочего органа клапана чаще всего выступает унифицированный пневматический сигнал 20…100 кПа. При этом для подключения к электронной системе автоматики используют специальные электропневмопреобразователи (ЭПП). С помощью этих устройств унифицированный электрический сигнал 4…20 мА или 0…10 В преобразуется в пневматический сигнал управления 20…100 кПа.
Клапаны с МИМ совместно с ЭПП имеют на порядок большее быстродействие по сравнению с клапанами с электроприводом, что позволяет обеспечивать большую точность в динамическом режиме работы. Однако, такой подход при построении системы управления несёт в себе одну скрытую угрозу.
Дело в том что в цепи управления присутствует преобразование без обратной связи (ЭПП ➝ МИМ ➝ процент открытия клапана) и на обоих этапах этого преобразования возможны нелинейности, вызывающие уменьшение динамической точности. Таким образом одна и та же величина сигнала управления генерируемая регулятором может приводить к различному проценту открытия клапана и, как следствие, к отличающемуся от ожидаемого воздействию на объект управления.

Неточная передача управляющих воздействий на объект управления связана с естественными отклонениями реальных устройств от их идеального представления. Эти отклонения присущи любым устройствам, хотя разные модели разных производителей могут иметь различную величину данных отклонений. Применительно к пропорциональным клапанам отклонение реальных устройств от их идеальных моделей обычно характеризуют четырьмя параметрами: линейность, чувствительность, гистерезис и повторяемость.
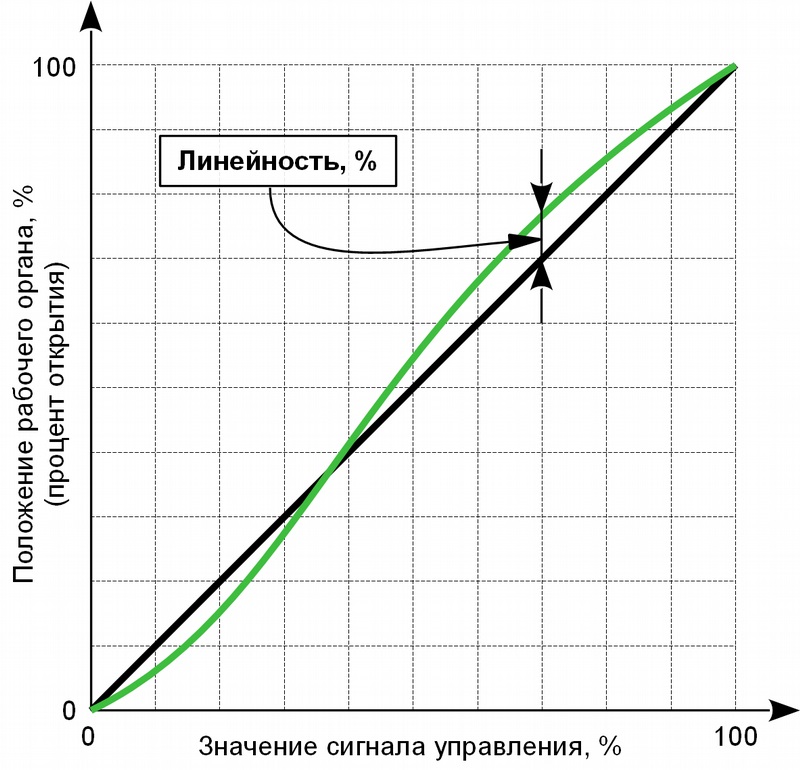
Характеризует отклонение реального положения рабочего органа клапана от расчётного, соответствующего текущему уровню входного сигнала. Идеальная зависимость между управляющим сигналом и положением рабочего органа клапана представляет из себя прямую линию. Однако, фактическое положение может отличаться от расчётного по ряду причин. Максимальное отклонение фактического положения от расчётного выражают в процентах и называют линейностью (или нелинейностью). На рисунке 5 характеристика идеального клапана показана чёрной линией, а реального зелёной. Для клапанов с трёхпозиционным управлением значение линейности не указывают, т. к. однозначная зависимость между сигналами управления и положением рабочего органа клапана отсутствует.
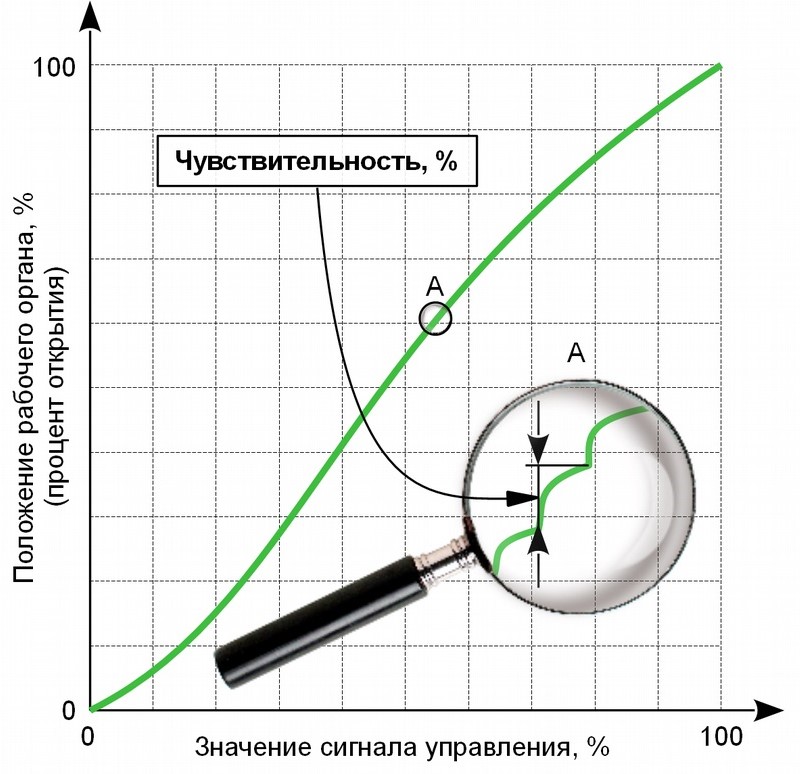
Если придерживаться формального подхода, определяет минимально возможное перемещение рабочего органа клапана. Выражается в процентах от общего перемещения. Чем меньше значение чувствительности, тем более незначительные изменения управляющего сигнала может отработать регулирующий клапан. Однако, не следует забывать что частые перемещения рабочего органа на малые расстояния приводят к повышенному износу и сокращают срок службы клапана. Поэтому, чаще всего, чувствительность клапана обозначает максимально возможную точность остановки рабочего органа в требуемом положении, а для того что-бы избежать микроперемещений при работе клапана в устройстве управления Рисунок 6 – Чувствительность вводится зона нечувствительности, превышающая чувствительность клапана и предотвращающая повышенный износ.
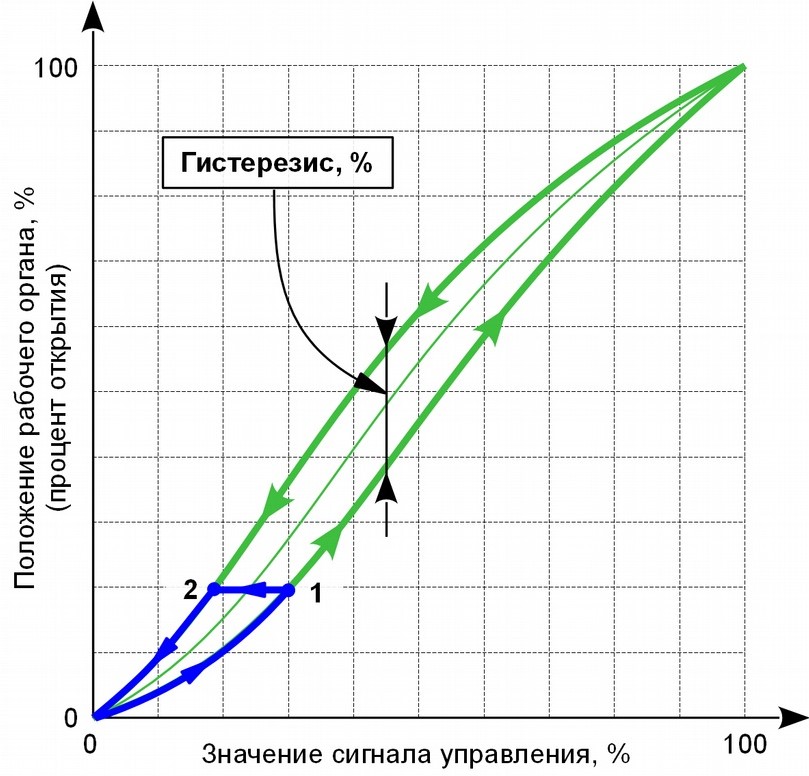
Под гистерезисом регулирующих клапанов понимают разность положений рабочего органа, которые он занимает при одной и той-же величине управляющего сигнала но при движении в разных направлениях – при закрытии и открытии. Наибольшее влияние на процесс регулирования гистерезис оказывает при изменении направления движения рабочего органа. Допустим, система управления открывает клапан. При этом рабочий орган движется по нижней кривой от точки 0 до точки 1. Если в этот момент требуется изменить направление движения, система управления уменьшает величину входного сигнала, однако, положение рабочего органа клапана не изменится до тех пор пока не будет достигнута точка 2.
Высококачественные клапаны имеют небольшой гистерезис, 1…2%, который не оказывает существенного влияния на процесс управления. Однако, гистерезис некоторых типов регулирующих клапанов может достигать 10…15%, что заставляет инженеров внедрять в систему управления дополнительные устройства или программные модули для компенсации влияния гистерезиса. В процессе эксплуатации, значение гистерезиса клапана может сильно увеличиваться вследствие износа. При критическом увеличении гистерезиса его называют люфтом.
Повторяемость это способность рабочего органа клапана занимать одинаковые положения при многократной подаче на него одинаковых входных сигналов. В отличии от измерительных приборов для клапанов значение повторяемости, обычно не является критичным, т. к. повторяемости почти любого современного клапана оказывается достаточно высокой чтобы не оказывать сколько-нибудь существенного влияния на процесс регулирования. Все эти отклонения возникают в разомкнутой части системы управления (ЭПП ➝ МИМ ➝ процент открытия клапана) и их качественная компенсация без введения обратной связи является сложным процессом, требующим применения нетрадиционных регуляторов и длительной настройки на этапе пусконаладочных работ.
В связи с высокой сложностью компенсации нелинейностей в цепи управления при использовании клапанов с МИМ и ЭПП от неё часто отказываются. При этом оценить точность системы управления в динамическом режиме работы становится практически невозможно и при построении системы приходится опираться на личный опыт проектировщиков, а представления о применимости тех или иных клапанов для решения поставленных задач формируются исходя из успехов (или неудач) уже реализованных проектов. Избежать неясностей при построении подобных систем управления позволяет введение в цепь управления обратной связи по положению штока клапана с формированием второго, стабилизирующего, контура. В качестве регулятора в этом контуре используется позиционер.
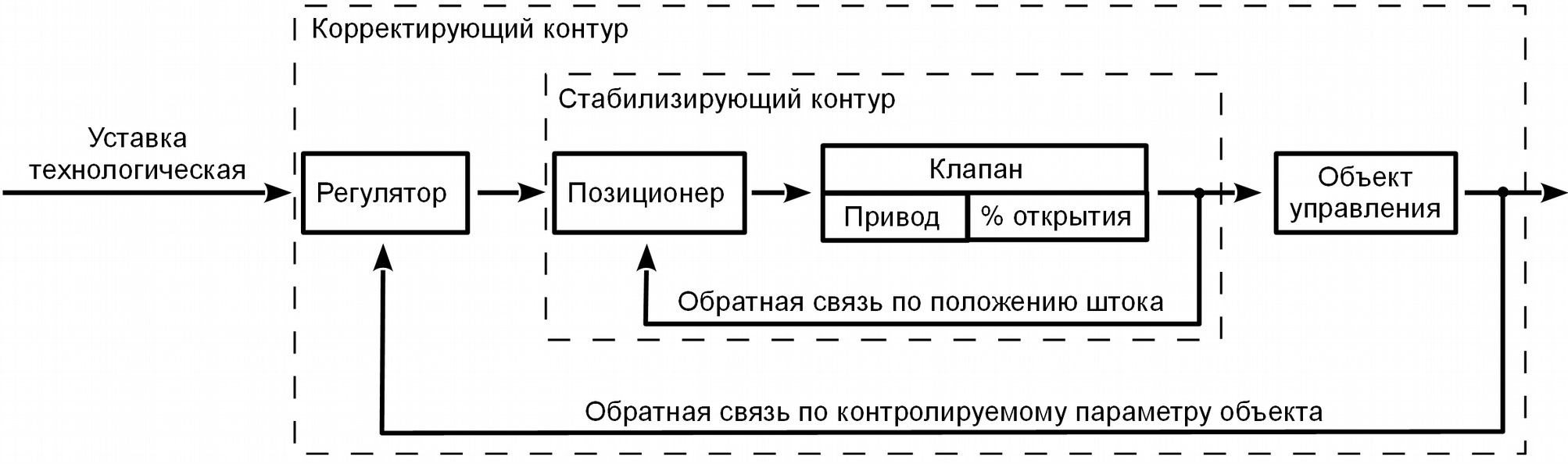

Это устройство которое полностью берёт на себя функцию управления клапаном. Примером может служить позиционер ASCO 60566318, который устанавливается на все регулирующие клапаны серий E290(резьбовой), S290(приварной) и T290(фланцевый). После установки позиционера на клапан запускается процедура инициализации, в процессе которой позиционер в автоматическом режиме собирает всю необходимую информацию о клапане и настраивает встроенный регулятор таким образом чтобы обеспечить оптимальное управление. После завершения инициализации из системы управления достаточно подать на позиционер пропорциональный сигнал с требуемым процентом открытия клапана, а позиционер приведёт клапан в нужное положение.

Использование клапанов с позиционером позволяет скомпенсировать нелинейности на этапах преобразования пропорционального электрического сигнала от регулятора в процент открытия клапана. Благодаря этому можно почти полностью отказаться от сложной процедуры ручной настройки регуляторов, управляющих пропорциональными клапанами.
Клапан с позиционером уже имеет в своём составе замкнутый контур управления с оптимально настроенным регулятором, среди прочего в автоматическом режиме компенсирующим гистерезис и нелинейность клапана. Таким образом время пусконаладочных работ сокращается до минимума, а расчёт точности упрощается и представляет из себя один параметр – зону нечувствительности встроенного в позиционер регулятора.
Для регулирующих клапанов ASCO с позиционером заводское значение зоны нечувствительности составляет 1%. Инженерам-проектировщикам следует, однако, помнить что даже такие высокие показатели точности не гарантируют высококачественного регулирования в случае неправильно выбранного регулирующего клапана. Так, например, часто встречающейся ошибкой при проектировании систем является выбор регулирующего клапана по диаметру трубопровода на котором он устанавливается.
При таком подходе реальный расход среды через регулирующий клапан может оказаться существенно ниже номинального расхода, а значит и показатели качества процесса регулирования ухудшатся в несколько раз. Поэтому при высоких требованиях к точности регулирования следует уделить особое внимание выбору клапана с коэффициентом расхода Kv соответствующим проектируемой системе.
На современном рынке технических средств автоматизации представлено большое количество различных регулирующих клапанов. Наиболее распространёнными являются три типа: клапаны с электроприводом с трёхпозиционным способом управления («больше/меньше»), клапаны с МИМ и ЭПП, клапаны с позиционером. Преимущества и недостатки каждого из них можно резюмировать следующим образом.

Плюсы:
Минусы:

Плюсы:
Минусы:

Плюсы:
Минусы:
Инженер ООО «КИП-Сервис»
Артем Б.
Дополнительные материалы:
При добавлении товара возникла ошибка. Пожалуйста, повторите попытку чуть позже.