Содержание:
Рабочее давление в системах отопления и водоснабжения — один из наиболее значимых параметров, который определяет возможность нормального, эффективного и безопасного функционирования. Значение данного параметра должно находиться в допустимых границах, указанных в нормативных документах:
В данной статье мы рассмотрим способ поддержания постоянного давления в системах отопления и водоснабжения с помощью насосного оборудования с частотно-регулируемым электроприводом, реализованного на базе преобразователя частоты ELHART серии EMD-PUMP.
Основной причиной отклонения давления от нормативных показателей является переменный характер потребления жидкости при неизменной производительности насоса. Например, в системах отопления, в зависимости от температуры окружающего воздуха, требуется различное количество тепловой энергии, которая передается посредством изменения расхода теплоносителя. Аналогичную ситуацию можно наблюдать в системах водоснабжения, где, в зависимости от времени суток, изменяется расход воды при открывании и закрывании кранов потребителем.
Выход рабочего давления за пределы границ нормативных значений влечет за собой целый ряд негативных последствий:
Оборудованием обеспечивающим подачу жидкости требуемого уровня давления в системах отопления и водоснабжения являются центробежные насосы с асинхронными электродвигателями (см. рисунок 1).


Рисунок 1 — Примеры применения центробежных насосов
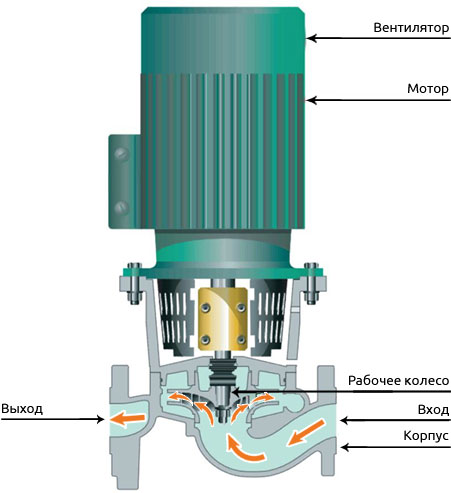
Центробежный насос представляет собой гидравлическую машину, создающую напорное перемещение жидкости при сообщении ей энергии. Перемещение жидкости в центробежном насосе происходит через рабочее колесо от центра к периферии (см. рисунок 2).
Основными параметрами, характеризующими режим работы насоса, являются напор и подача.
Напор (Н) — это прирост энергии потока за время прохождения жидкости через рабочие полости насоса, выраженный в метрах столба жидкости. Понятие напор равноценно термину давление. Напор и давление связаны между собой следующим соотношением:
где: Р — давление насоса, [Па];
ρ — плотность жидкости, [кг/м³];
g=9,8 — ускорение свободного падения [м/с²].
Подача (Q) — объем жидкости, перекачиваемый насосом
за единицу времени, выражается
в (м³/ч) или (м³/с).
Зависимость напора насоса от его объемной подачи при постоянной частоте вращения рабочего колеса называется напорной характеристикой насоса. Напорная характеристика может быть построена с помощью установки с открытой трубой за насосом (см. рисунок 3).
Напор, создаваемый насосом, равен высоте столба жидкости в открытой трубе, при этом высота подъема жидкости измеряется от уровня входа в насос.
Анализируя напорную характеристику насоса, представленную на рисунке 3, у читателя может возникнуть вопрос: «А как же обеспечить требуемый уровень давления при переменном расходе? Ведь увеличение расхода ведет к снижению напора, а значит и давления, либо наоборот, снижение расхода будет способствовать росту давления в системе».
Для ответа на этот вопрос необходимо обратиться к уравнениям подобия центробежного насоса [2]:
где:
nном — номинальная частота вращения, [об/мин];
nперем — переменная частота вращения, [об/мин];
Qном и Qперем — подача при nном и nперем соответственно, [м³/с];
Нном и Нперем — напор при nном и nперем соответственно, [м];
Pном и Pперем — потребляемая мощность при nном и nперем соответственно, [кВт].
Формулы справедливы для турбулентного движения жидкости в насосе, поскольку только в этом случае потери напора пропорциональны квадрату ее скорости. Также необходимо учитывать, что при низкой частоте вращения nперем ≤ (0,1—0,15) nном (диапазон частот у разных модификаций и производителей насосов может различаться) зависимость между подачей и напором насоса нарушается. Это связано с тем, что при снижении частоты вращения скорость движения воды в насосе уменьшается, и при достижении некоторого критического значения скорости движения изменяется характер движения воды в насосе — течение перестает быть турбулентным. При дальнейшем уменьшении частоты вращения сначала наступает неопределенный переходной режим, а затем, при очень малых скоростях, характер движения воды становится ламинарным.
Если, используя уравнения подобия, попытаться построить напорные характеристики насоса при изменении частоты вращения рабочего колеса, получатся графики, подобные тем, что изображены на рисунке 4:
Опираясь на вышеизложенную информацию, становится понятно, что для поддержания постоянного уровня напора, а значит и давления, при изменении расхода в системе требуется изменять частоту вращения рабочего колеса насоса. В результате характеристика насоса будет иметь вид, показанный на рисунке 5:
Данный способ управления называется «частотное регулирование насоса в режиме поддержания давления». Для его реализации используются преобразователи частоты ELHART серии EMD-PUMP:

Преимущества использования ПЧ ELHART серии EMD-PUMP:
Установку и подключение частотного преобразователя, двигателя, а также датчика давления, используемых в схемах управления описанных в данной статье, необходимо осуществлять в соответствии с рекомендациями приведенными в «Быстрый старт ПЧ ELHART (задание уставки ПИД-регулятора внешним потенциометром)», «Быстрый старт ПЧ ELHART (задание уставки ПИД-регулятора по суточному графику)» и в руководстве по эксплуатации ПЧ. В рамках этой статьи будет рассмотрено два варианта реализации управления насосом в режиме поддержания постоянного давления, различия между которыми будет заключаться в способе задания уставки ПИД-регулятора:
а) задание уставки ПИД-регулятора с помощью внешнего потенциометра;
б) задание уставки ПИД-регулятора по суточному графику.
В данном режиме работы ПЧ будет изменять выходную частоту в зависимости от сигнала обратной связи, поступающего от подключенного датчика давления, тем самым осуществляя регулирование давления в системе. Задание уставки осуществляется с помощью внешнего потенциометра, подключенного к аналоговому входу FIV.
Схема подключения преобразователя частоты изображена на рисунке 7:
Для использования встроенного блока питания 24 В необходимо объединить «общий вывод для аналоговых сигналов — FC» и «общий вывод для дискретных сигналов — SC» с помощью перемычки, как это показано на рисунке 7.
| Маркировка | Описание | |
|---|---|---|
| EMD-PUMP-0055 T* | Преобразователь частоты ELHART (5,5 кВт, 12,5А, 380В, встроенный ПИД-регулятор, каскадный режим, график уставок, поддержание диф. давления, съемный пульт, RS-485 Modbus RTU), серия EMD-PUMP для насосов и вентиляторов |
 |
| PTE5000C-010-М20-С* | Датчик давления 0…10 бар, точность 0,5%, выход 4…20 мА, М20*1,5 наружная резьба, питание 10…30 V DC, -20 ... +100 °С |
 |
| 00000006782 | Кран трехходовой м/м, М20х1,5 внутр. / G1/2 внутр., рабочее давление - 2,5МПа, макс. - 6,0МПа, макс. температура – 120 °С |
 |
| 00000003129 | Трубка сиф. петлевая прямая внутр. G1/2 / наруж. G1/2 (сталь, 250 бар, 300 °С, длина 360мм) |
 |
| №4 БП-КР-40-G1/2 | Бобышка приварная (штуцер приварной под кран для манометра, высота 40мм, G1/2 наружная, d=21мм) |
 |
| BPRххK | Потенциометр (установка 22мм) |
 |
| B100S20 | Переключатель 0-1 с фикс. 1НО |
 |
| AD22DS-024 | Лампа (LED) сигнал. матрица d22мм, зеленый 24В |
 |
* — модификация определяется при заказе.
| Код | Параметр | Описание | Выставленное значение |
|---|---|---|---|
| F1.17 | Установка заводских параметров | Установить заводские параметры | 8 |
| F0.00 | Параметр, отображаемый на дисплее после подачи питания | Сигнал обратной связи ПИД-регулятора | 6 |
| F1.02 | Источник команд управления | Многофункциональные дискретные входы | 1 |
| F1.03 | Блокировка кнопки «STOP» на пульте управления | Кнопка заблокирована | 0 |
| F1.04 | Блокировка вращения назад | Вращение назад запрещено | 0 |
| F1.06 | Минимальная выходная частота | 25 Гц | 25 |
| F1.07 | Время ускорения | 15 сек | 15 |
| F2.01 | Способ остановки двигателя | Остановка на выбеге | 1 |
| F3.00 | Минимальное напряжение на входе FIV | 0 В | 0 |
| F3.01 | Максимальное напряжение на входе FIV | 10 В | 10 |
| F3.03 | Минимальный ток на входе FIC | 4 мА | 4 |
| F3.04 | Максимальный ток на входе FIC | 20 мА | 20 |
| F3.15 | Многофункциональный дискретный вход FWD | Вращение в прямом направлении | 6 |
| F3.25 | Многофункциональный релейный выход YA,YB, YC | ПЧ работает | 1 |
| F6.00 | Включение ПИД-регулятора | Включен | 1 |
| F6.01 | Тип обратной связи ПИД-регулятора | Отрицательная обратная связь | 0 |
| F6.02 | Источник задания уставки ПИД-регулятора | Аналоговый сигнал на входе FIV | 1 |
| F6.03 | Источник обратной связи ПИД-регулятора | Аналоговый сигнал на входе FIC | 1 |
| F6.34 | Режим работы двигателя 1 | Работа от преобразователя частоты | 1 |
| F6.35 | Режим работы двигателя 2 | Не используется | 0 |
| F6.36 | Режим работы двигателя 3 | Не используется | 0 |
| F6.37 | Режим работы двигателя 4 | Не используется | 0 |
| F6.38 | Режим работы двигателя 5 | Не используется | 0 |
| F6.39 | Режим работы двигателя 6 | Не используется | 0 |
| F6.40 | Режим работы двигателя 7 | Не используется | 0 |
| F6.68 | Возможность ухода в спящий режим | Активна | 255 |
| F6.69 | Допустимое отклонение сигнала обратной связи от уставки для перехода в спящий режим | 5% | 5 |
| F6.70 | Время задержки перехода в спящий режим | 60 сек | 60 |
| F6.71 | Частота перехода в спящий режим | 25 Гц | 25 |
| F6.73 | Допустимое отклонение сигнала обратной связи от уставки для выхода из спящего режима | 3% | 3 |
| F6.74 | Время задержки выхода из спящего режима | 3 сек | 3 |
Для осуществления автоматического запуска ПЧ (например, в установках без обслуживающего персонала) после пропадания питания необходимо задействовать функцию «Автостарт после подачи питания» (см. таблица 3).
Не используйте данную функцию при нестабильном питающем напряжении.
| Код | Параметр | Описание | Выставленное значение |
|---|---|---|---|
| F4.16 | Автостарт после подачи питания | Разрешен | 1 |
| F4.17 | Задержка автостарта после подачи питания | 0...10,0 сек | — |
При пропадании питающего напряжения ПЧ сохранит команду на запуск. При подаче питания ПЧ произведет запуск электродвигателя после истечения времени ожидания, заданного в параметре F4.17.
Если данная функция не включена, при подаче питания на ПЧ необходимо осуществить сброс и повторную подачу сигнала «Пуск» на дискретный вход FWD.
Для исключения несанкционированного доступа к параметрам настройки ПЧ необходимо установить блокировку изменения параметров (см. таблица 4).
| Код | Параметр | Описание | Выставленное значение |
|---|---|---|---|
| F1.18 | Блокировка изменения параметров | Блокировка установлена | 1 |
В данной статье приведен частный случай настройки ПЧ, при необходимости параметры настройки могут быть скорректированы в соответствии с требованиями технологического процесса. Расширенное описание параметров настройки приведено в пункте "4.3 Описание параметров настройки ПЧ ELHART серии EMD-PUMP". Полный список программируемых параметров ПЧ приведен в руководстве по эксплуатации ПЧ.
Применение ПЧ ELHART для управления двигателем насоса позволяет реализовать режим поддержания давления по суточному графику (до 8 точек). В этом режиме, в соответствии с заданием пользователя, преобразователь частоты автоматически изменяет уставку в заданное время суток (см. рисунок 8) и корректирует выходную частоту в зависимости от сигнала обратной связи, поступающего от подключенного датчика давления.
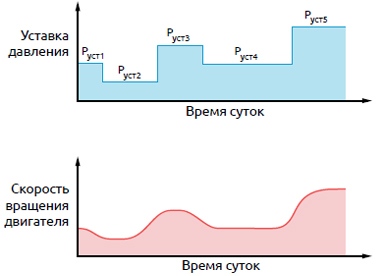
Данный способ управления актуален при регулировании давления в сетях водоснабжения, режим водопотребления которых изменяется в течение суток. Поэтому для снижения потерь, уменьшения нагрузки на оборудование и оптимизации энергопотребления целесообразно поддерживать требуемое минимальное избыточное давление при максимальных и минимальных часовых расходах.
Схема подключения ПЧ для реализации данного способа регулирования давления изображена на рисунке 9, параметры настройки приведены в таблице 6.
Для использования встроенного блока питания 24 В необходимо объединить «общий вывод для аналоговых сигналов — FC» и «общий вывод для дискретных сигналов — SC» с помощью перемычки, как это показано на рисунке 9.
| Маркировка | Описание | |
|---|---|---|
| EMD-PUMP-0055 T* | Преобразователь частоты ELHART (5,5 кВт, 12,5А, 380В, встроенный ПИД-регулятор, каскадный режим, график уставок, поддержание диф. давления, съемный пульт, RS-485 Modbus RTU), серия EMD-PUMP для насосов и вентиляторов |
|
| PTE5000C-010-М20-С* | Датчик давления 0…10 бар, точность 0,5%, выход 4…20 мА, М20*1,5 наружная резьба, питание 10…30 V DC, -20 ... +100 °С |
|
| 00000006782 | Кран трехходовой м/м, М20х1,5 внутр. / G1/2 внутр., рабочее давление - 2,5МПа, макс. - 6,0МПа, макс. температура – 120 °С |
|
| 00000003129 | Трубка сиф. петлевая прямая внутр. G1/2 / наруж. G1/2 (сталь, 250 бар, 300 °С, длина 360мм) |
|
| №4 БП-КР-40-G1/2 | Бобышка приварная (штуцер приварной под кран для манометра, высота 40мм, G1/2 наружная, d=21мм) |
|
| BPRххK | Потенциометр (установка 22мм) |
|
| AD22DS-024 | Лампа (LED) сигнал. матрица d22мм, зеленый 24В |
|
* — модификация определяется при заказе.
| Код | Параметр | Описание | Выставленное значение |
|---|---|---|---|
| F1.17 | Установка заводских параметров | Установить заводские параметры | 8 |
| F0.00 | Параметр, отображаемый на дисплее после подачи питания | Сигнал обратной связи ПИД-регулятора | 6 |
| F1.02 | Источник команд управления | Многофункциональные дискретные входы | 1 |
| F1.03 | Блокировка кнопки «STOP» на пульте управления | Кнопка заблокирована | 0 |
| F1.04 | Блокировка вращения назад | Вращение назад запрещено | 0 |
| F1.06 | Минимальная выходная частота | 25 Гц | 25 |
| F1.07 | Время ускорения | 15 сек | 15 |
| F2.01 | Способ остановки двигателя | Остановка на выбеге | 1 |
| F3.03 | Минимальный ток на входе FIC | 4 мА | 4 |
| F3.04 | Максимальный ток на входе FIC | 20 мА | 20 |
| F3.15 | Многофункциональный дискретный вход FWD | Вращение в прямом направлении | 6 |
| F3.25 | Многофункциональный релейный выход YA,YB,YC | ПЧ работает | 1 |
| F6.00 | Включение ПИД-регулятора | Включен | 1 |
| F6.01 | Тип обратной связи ПИД-регулятора | Отрицательная обратная связь | 0 |
| F6.02 | Источник задания уставки ПИД-регулятора | Фиксированные уставки F6.60...F6.67 | 0 |
| F6.03 | Источник обратной связи ПИД-регулятора | Аналоговый сигнал на входе FIC | 1 |
| F6.28 | Установка времени, секунды | 0...60 сек | - |
| F6.29 | Установка времени, минуты | 0...60 мин | - |
| F6.30 | Установка времени, часы | 0...24 час | - |
| F6.31 | Установка даты, дни | 1...31 день | - |
| F6.32 | Установка даты, месяцы | 1...12 мес | - |
| F6.33 | Установка даты, год | 00...99 год | - |
| F6.34 | Режим работы двигателя 1 | Работа от преобразователя частоты | 1 |
| F6.35 | Режим работы двигателя 2 | Не используется | 0 |
| F6.36 | Режим работы двигателя 3 | Не используется | 0 |
| F6.37 | Режим работы двигателя 4 | Не используется | 0 |
| F6.38 | Режим работы двигателя 5 | Не используется | 0 |
| F6.39 | Режим работы двигателя 6 | Не используется | 0 |
| F6.40 | Режим работы двигателя 7 | Не используется | 0 |
| F6.52 | Время включения уставки давления 1 | 00.00...23.59 | - |
| F6.53 | Время включения уставки давления 2 | 00.00...23.59 | - |
| F6.54 | Время включения уставки давления 3 | 00.00...23.59 | - |
| F6.55 | Время включения уставки давления 4 | 00.00...23.59 | - |
| F6.56 | Время включения уставки давления 5 | 00.00...23.59 | - |
| F6.57 | Время включения уставки давления 6 | 00.00...23.59 | - |
| F6.58 | Время включения уставки давления 7 | 00.00...23.59 | - |
| F6.59 | Время включения уставки давления 8 | 00.00...23.59 | - |
| F6.60 | Уставка давления 1 | 0...100% | - |
| F6.61 | Уставка давления 2 | 0...100% | - |
| F6.62 | Уставка давления 3 | 0...100% | - |
| F6.63 | Уставка давления 4 | 0...100% | - |
| F6.64 | Уставка давления 5 | 0...100% | - |
| F6.65 | Уставка давления 6 | 0...100% | - |
| F6.66 | Уставка давления 7 | 0...100% | - |
| F6.67 | Уставка давления 8 | 0...100% | - |
| F6.68 | Возможность ухода в спящий режим | Активна | 255 |
| F6.69 | Допустимое отклонение сигнала обратной связи от уставки для перехода в спящий режим | 5% | 5 |
| F6.70 | Время задержки перехода в спящий режим | 60 сек | 60 |
| F6.71 | Частота перехода в спящий режим | 25 Гц | 25 |
| F6.73 | Допустимое отклонение сигнала обратной связи от уставки для выхода из спящего режима | 3% | 3 |
| F6.74 | Время задержки выхода из спящего режима | 3 сек | 3 |
Пользователь также может задействовать функции «Автостарт после подачи питания» и «Блокировка изменения параметров». Настройка данных параметров описана в пункте 4.2 "Задание уставки ПИД-регулятора с помощью внешнего потенциометра".
В данной статье приведен частный случай настройки ПЧ, при необходимости параметры настройки могут быть скорректированы в соответствии с требованиями технологического процесса. Расширенное описание параметров настройки приведено в пункте 4.3 "Описание параметров настройки ПЧ ELHART серии EMD-PUMP". Полный список программируемых параметров ПЧ приведен в руководстве по эксплуатации ПЧ.
F0.00 — Параметр, отображаемый на дисплее после подачи питания
Значение в F0.00 определяет отображаемый на дисплее параметр. Выбранный параметр будет являться стартовым экраном и также будет доступен в списке основных экранов отображения (подробное описание приведено в руководстве по эксплуатации ПЧ). Пользователю доступны следующие варианты настройки:
0: Заданная частота
1: Выходная частота
2: Выходной ток
3: Скорость вращения
4: Напряжение на звене постоянного тока
5: Внутренняя температура ПЧ
6: Сигнал обратной связи ПИД-регулятора
8: Текущее время в формате "Часы. Минуты"
9: Текущая дата в формате "Число. Месяц"
F1.02 — Источник команд управления
В данном параметре пользователь может выбрать источник команд управления преобразователем частоты. К выбору доступны следующие варианты:
0: Пульт управления
Управление преобразователем частоты осуществляется посредством цифрового пульта, который входит в комплект поставки и по умолчанию установлен на лицевую панель преобразователя. Команды "Старт"/"Стоп" подаются нажатием на пульте управления
ПЧ кнопок 
При необходимости данный пульт управления может быть вынесен с помощью 2-х метрового кабеля, который также входит в комплект поставки ПЧ.
1: Многофункциональные дискретные входы
Пуск и останов преобразователя частоты осуществляется многофункциональными дискретными входами.
В приведенных схемах управления (см. пункты 4.1 "Задание уставки ПИД-регулятора с помощью внешнего потенциометра" и 4.2 "Задание уставки ПИД-регулятора по суточному графику") сигнал пуска ПЧ
поступает при переводе НО контакта переключателя B100S20 (контакт S1 на рисунках 7 и 9) в замкнутое положение, размыкание этого контакта останавливает работу преобразователя.
Пользователь может изменить способ пуска и остановки ПЧ, например, добавив кнопку «СТОП» и настроив любой из дискретных входов на остановку ПЧ.
В качестве примера возможного изменения схемы управления пуском и остановкой ПЧ рассмотрим схему, изображенную на рисунке 11:
Настраиваемые параметры:
| Код | Параметр | Описание | Выставленное значение |
|---|---|---|---|
| F1.02 | Источник сигналов управления | Многофункциональные дискретные входы | 1 |
| F3.17 | Многофункциональный дискретный вход S1 | Команда "Пуск" (3-х проводное управление, контакт НО | 5 |
| F3.18 | Многофункциональный дискретный вход S2 | Команда "Стоп" (3-х проводное управление, контакт НО | 8 |
Алгоритм работы схемы следующий: при подаче сигнала на дискретный вход S1 (замыкание НО контакта) произойдет пуск ПЧ, при подаче сигнала на дискретный вход S2 (размыкание НЗ контакта) ПЧ остановится.
2: Интерфейс RS-485
Сигнал "Пуск"/"Стоп" поступает по интерфейсу связи RS-485. Подробная информация приведена в руководстве по эксплуатации на прибор (Приложение Б).F1.03 — Блокировка кнопки «STOP» на пульте управления
Значение параметра определяет активность кнопки  на пульте управления преобразователя частоты при настройке параметра F1.02=1 или F1.02=2:
на пульте управления преобразователя частоты при настройке параметра F1.02=1 или F1.02=2:
0: Кнопка заблокирована — с помощью кнопки нельзя остановить работу ПЧ;
1: Кнопка активна — с помощью кнопки можно остановить работу ПЧ.
F1.07 — Время ускорения
F1.08 — Время замедления
Время ускорения − это время, за которое произойдет увеличение частоты от 0 Гц до максимальной рабочей частоты (F1.05). Время замедления — это время, за которое произойдет снижение частоты от максимальной рабочей частоты до минимальной (см. рисунок 12).
При изменении параметров стоит учитывать, что слишком малое время разгона или торможения может привести к перегрузке ПЧ и возникновению аварийных ситуаций.
F6.02 — Источник задания уставки ПИД-регулятора
Значение параметра определяет источник задания уставки ПИД-регулятора. Задание уставки может поступать от следующих источников:
0: Фиксированные уставки F6.60...F6.67
Данный способ управления подробно описан в главе "4.2 Задание уставки ПИД-регулятора по суточному графику".
1: Аналоговый сигнал на входе FIV
Данный способ управления подробно описан в главе "4.1 Задание уставки ПИД-регулятора с помощью внешнего потенциометра".
По умолчанию вход настроен на диапазон 0...10 В, ему соответствует диапазон задания уставки от 0 до 100 %. Например, при подключении к ПЧ датчика давления PTE5000C-006-М20-С (диапазон измерения от 0 до 6 бар), для задания уставки давления 3 бар аналоговый сигнал на входе FIV должен соответствовать 50% от диапазона измерения датчика давления, то есть 5 В.
При необходимости сигнал на входе FIV может быть отмасштабирован, для этого пользователю нужно задать нижнюю и верхнюю границы сигнала — параметры F3.00 и F3.01. Например, при настройке F3.00 = 2 и F3.01 = 8, задание уставки ПИД-регулятора от 0 до 100% будет изменяться в диапазоне входного сигнала от 2 В до 8 В. Сигнал ниже 2 В будет соответствовать нулевому значению задания уставки, сигнал выше 8 В будет соответствовать максимальному значению задания уставки — 100%.
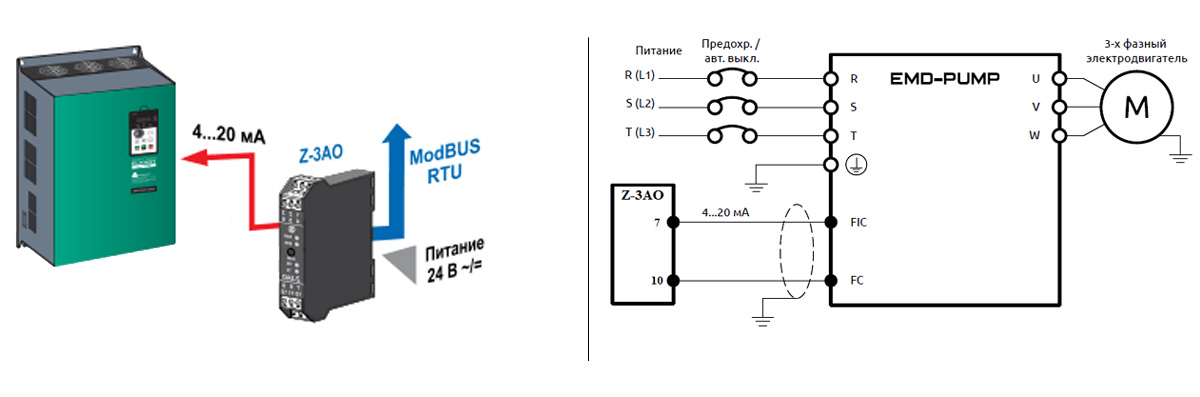
2: Аналоговый сигнал на входе FIC
При выборе источника задания уставки ПИД-регулятора «Аналоговый сигнал на входе FIС» (например, сигнал для задания уставки посылается с модуля вывода аналогового сигнала Z-3AO (см. рисунок 13), изменение уставки регулятора будет осуществляться в соответствии с уровнем сигнала на входе FIC.
По умолчанию вход настроен на диапазон 4...20 мА, ему соответствует диапазон задания уставки 0 до 100 %. Например, при подключении к ПЧ датчика давления PTE5000C-006-М20-С (диапазон измерения от 0 до 6 бар), для задания уставки давления 3 бар аналоговый сигнал на входе FIC должен соответствовать 50 % от диапазона измерения датчика давления, то есть 12 мА.
При необходимости сигнал на входе FIC может быть отмасштабирован, для этого пользователю нужно задать нижнюю и верхнюю границы сигнала — параметры F3.02 и F3.03. Например, при настройке F3.02 = 5 и F3.01 = 15, задание уставки ПИД-регулятора от 0 до 100% будет изменяться в диапазоне входного сигнала от 5 мА до 15 мА. Сигнал ниже 5 мА будет соответствовать нулевому значению задания уставки, сигнал выше 15 мА будет соответствовать максимальному значению задания уставки — 100%.
3: Потенциометр на пульте управления ПЧ
Для задания уставки ПИД-регулятора используется потенциометр на пульте управления ПЧ (см. рисунок 14).

4: Фиксированное значение F6.04
Задание для ПИД-регулятора будет соответствовать значению параметра F6.04. Во время работы уставка, выставленная в параметре F6.04, может быть изменена с помощью кнопок «ВВЕРХ/ВНИЗ», расположенных на пульте управления ПЧ (см. рисунок 15).

F6.03 — Источник обратной связи ПИД-регулятора
Значение параметра определяет источник сигнала обратной связи для ПИД-регулятора. В качестве источника сигнала обратной связи могут использоваться:
0: Аналоговый сигнал на входе FIV
Сигнал обратной связи от датчика регулируемой величины подается на вход FIV. По умолчанию вход настроен на диапазон 0...10 В.
1: Аналоговый сигнал на входе FIC
Сигнал обратной связи от датчика регулируемой величины подается на вход FIC. По умолчанию вход настроен на диапазон 4...20 мА.
2: Разность аналоговых сигналов на входах FIV и FIC
В качестве сигнала обратной связи для ПИД-регулятора используется разность значений на входах FIV и FIC.
3: Разность аналоговых сигналов на входах FIC и FIV
В качестве сигнала обратной связи для ПИД-регулятора используется разность значений на входах FIC и FIV.
Каждый аналоговый вход при необходимости может быть перенастроен:

F6.68 — Выбор времени перехода в спящий режим
F6.69 — Допустимое отклонение сигнала обратной связи от уставки для перехода в спящий режим
F6.70 — Время задержки перехода в спящий режим
F6.71 — Частота перехода в спящий режим
F6.73 — Допустимое отклонение сигнала обратной связи от уставки для выхода из спящего режима
F6.74 — Время задержки выхода из спящего режима
"Спящий режим" ПИД-регулятора используется для энергосбережения при поддержании установленного параметра, например давления воды в системе водоснабжения. В параметре F6.68 указывается период времени, в который возможен переход в спящий режим. Время указывается в параметрах F6.52...F6.59. Восемь периодов времени соответствуют 8 битам: Т8 − Т7 − Т6 − Т5 − Т4 − Т3 − Т2 − Т1. Когда все 8 периодов времени выбраны, в параметр устанавливается значение 255, что соответствует 11111111 в двоичном коде. Если значение параметра уста- новлено в "0", "Спящий режим" не активен.
В параметрах F6.69...F6.71 задаются условия для перехода в "Спящий режим".
Когда величина сигнала обратной связи превышает значение уставки на значение параметра F6.69 и выходная частота ПЧ меньше значения параметра F6.71 в течение времени, указанного в параметре F6.70, происходит отключение электродвигателя и ПЧ переходит в "Спящий режим".
В параметрах F6.73...F6.74 задаются условия выхода из "Спящего режима":
Когда величина сигнала обратной связи станет ниже значения уставки на значение отклонения (F6.73) в течение времени задержки (F6.74), ПЧ выйдет из "Спящего режима".
В данной статье мы рассмотрели один из наиболее современных, функциональных и перспективных способов поддержания постоянного давления в системах отопления и водоснабжения — использование насосного оборудования с частотно-регулируемым электроприводом. Предложенная схема управления, построенная на базе преобразователя частоты ELHART серии EMD-PUMP, позволяет оптимизировать работу оборудования: обеспечивает экономию электроэнергии, исключает гидравлические удары, снижает потери теплоносителя, увеличивает срок службы, снижает нагрузку на питающую сеть и в целом повышает степень автоматизации системы.
Приложения:
Инженер ООО «КИП-Сервис»
Александр Пименов
Список использованной литературы:
При добавлении товара возникла ошибка. Пожалуйста, повторите попытку чуть позже.