Содержание:
Нормирующие преобразователи — это приборы, предназначенные для преобразования входных аналоговых сигналов, например, сигналов с термопар, термопреобразователей сопротивления или переменных резисторов, в стандартный унифицированный аналоговый сигнал в виде тока 0...20 мА, 4...20 мА, 0...5 мА или напряжения 0...1 В, 0...10 В, 2...10 В.
В промышленности нормирующие преобразователи, их называют также измерительным или промежуточными преобразователями, активно используют по нескольким причинам.
Во-первых, нормирующие преобразователи используют для согласования первичных средств измерений (в частности термопар и термопреобразователей сопротивления) со вторичными средствами измерений разных производителей, такими как модули аналогового ввода, ПЛК или локальные регуляторы, у которых есть аналоговые входы, воспринимающие унифицированные сигналы тока или напряжения. Стоить отметить, что статических характеристик термопар и термопреобразователей сопротивлений не менее двух десятков, а наиболее распространённых унифицированных сигналов в виде тока и напряжения всего шесть!
Во-вторых, нормирующие преобразователи, при наличии у них гальванической развязки, увеличивают помехозащищенность первичных и вторичных средств измерений.
В-третьих, нормирующие преобразователи, при наличии у них гальванической развязки, используют для защиты в целом дорогостоящего оборудования и его измерительных цепей от внешних пагубных воздействий, таких как короткое замыкание, мощные скачки напряжения вследствие удара молнии и т.д.
В-четвертых, нормирующие преобразователи используют для увеличения длины линии связи между первичными и вторичными измерительными приборами. Например, сигнал от термопар можно передавать только с помощью специальных экранированных компенсационных проводов, изготовленных из тех же сплавов, что и сами датчики температуры, притом длина линии связи не должна превышать 20 м. Тогда как токовый сигнал можно передавать через экранированные медные провода с длиной линии связи до 100 м без использования повторителей.
Стоит отметить, что промышленность выпускает нормирующие преобразователи как с гальванической развязкой так и без нее. Для улучшения помехозащищенности и защиты измерительной системы в целом, следует использовать нормирующие преобразователи именно с гальванической развязкой.
Измерительные преобразователи сигналов изготавливаются в виде таблеток, как например на рисунке 1а (нормирующий преобразователь T120), устанавливаемых в коммутационную головку термопары или термопреобразователя сопротивления, или в виде модулей на DIN-рейку — рисунок 1б (компактный преобразователь К121).


В промышленности так же встречаются приборы у которых функция нормирующего преобразователя является одним из режимов работы. Такой функцией, например, обладает измеритель - регулятор ECD2-M, см. рисунок 2. У двухканального ПИД-регулятора ECD2-M достаточно включить режим нормирующего преобразователя, задать диапазон преобразования и диапазон выходного сигнала, и после этого прибор готов к работе.

Может не столь очевидно, но нормирующий преобразователь можно реализовать путем настройки ПИД-регулятора, имеющего аналоговый выход. В данной статье мы подробно рассмотрим настройку ПИД-регулятора на примере регулятора фирмы EMKO серии ESM-4435, который имеет универсальный измерительный вход и аналоговый выход в виде тока 4...20 мА. Внешний вид ESM-4435 представлен на рисунке 3, а его функциональная схема на рисунке 4.

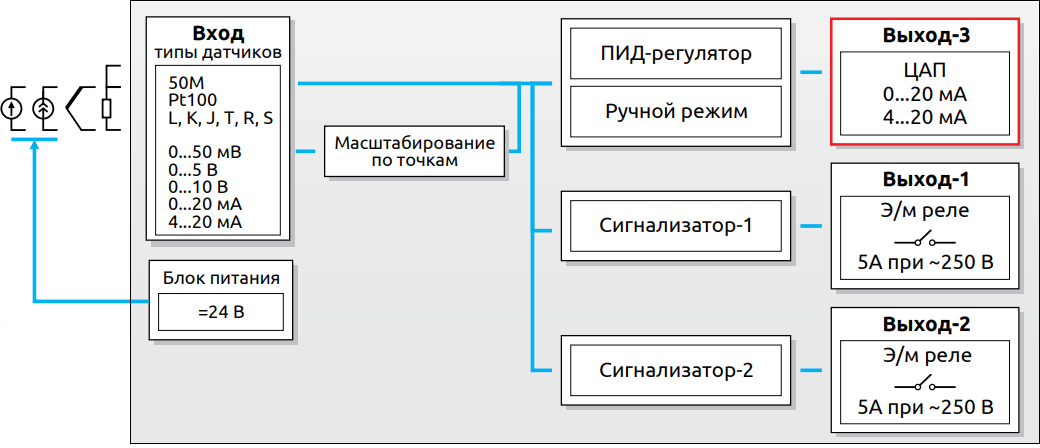
Работа промежуточного преобразователя состоит из двух этапов — измерение сигнала, поступающего от первичного преобразователя (датчика), и его линейное преобразование в сигнал тока или напряжения. Так как неотъемлемой функцией ПИД-регулятора является измерение, первая часть задачи реализуется автоматически.
Чтобы ПИД-регулятор работал так же, как и нормирующий преобразователь требуется:
1. выделить из ПИД-регулятора линейную, иначе говоря, пропорциональную составляющую, то есть получить П-регулятор;
2. задать режим работы регулятора, при котором увеличение значения измеряемого параметра будет приводить к увеличению выходного сигнала регулятора;
3. задать диапазон преобразования.
Как мы помним, аббревиатура «ПИД-регулятор» расшифровывается как пропорционально интегрально дифференциальный регулятор. Одна из распространенных формул ПИД закона регулирования имеет вид:
где:
Рвых — выходной сигнал ПИД-регулятора, выраженный в %;
е — ошибка регулирования, то есть разность между измеренным на входе значением и уставкой, выраженная в °С;
Xp, Tu, Td — настраиваемые коэффициенты ПИД-регулятора, а именно полоса пропорциональности, выраженная в °С, время интегрирования и время дифференцирования, выраженные в секундах.
Для получения П-регулятора требуется отключить интегральную и дифференциальную части. В цифровых регуляторах это реализуется путем задания коэффициентов Тu и Тd равными нулю, при этом интегральная и дифференциальные части ПИД регулятора программно отключаются. Таким образом, формула (1) преобразуется в формулу (2):
П-регулятор, ровно как и ПИД, может работать в двух режимах — в режиме «Нагреватель» и в режиме «Холодильник». Режим «Нагреватель» — это режим, при котором увеличение значения измеряемого параметра приводит к уменьшению выходного сигнала регулятора, а режим «Холодильник» — режим, при котором увеличение значения измеряемого параметра приводит к увеличению выходного сигнала регулятора. Графики работы указанных режимов представлены на рисунке 5.
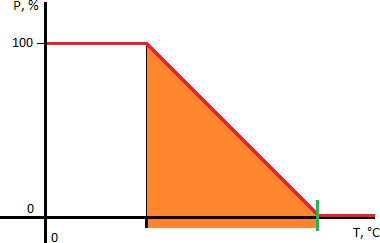
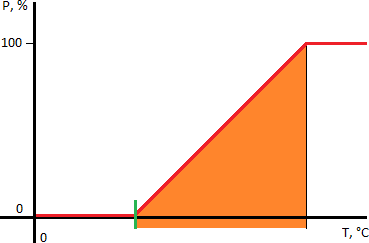
Выходной сигнал нормирующего преобразователя прямо пропорционален измеренному значению, следовательно, нам требуется выбрать режим работы регулятора «Холодильник» (рисунок 5б).
Выходной сигнал П-регулятора формируется по формуле (2). Если обозначить уставку через SV (распространенное обозначение уставки, которое расшифровывается как Set Value), а измеренную величину обозначить через PV (Process Value), то ошибка регулирования будет определяться формулой (3): е = PV – SV
И формула (2) преобразуется в формулу (4):
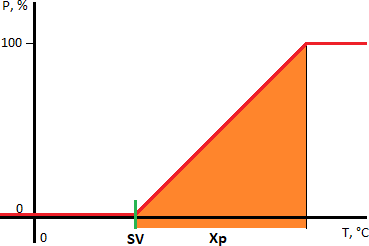
Таким образом, в формуле (4) всего три переменные — PV – измеряемая величина, а SV и Xp – настраиваемые параметры, которые и определяют диапазон преобразования, где SV – точка начала диапазона, а Xp — сам диапазон, см. рисунок 6.
Действие ПИД-регулятора EMKO серии ESM-4435 удовлетворяет всем необходимым условиям, то есть имеет универсальный аналоговый вход, поддерживает режимы «Нагреватель» и «Холодильник» и имеет аналоговый токовый выход, который может выдавать ток в диапазоне 0…20 мА или 4…20 мА.
Единственное, на что надо обратить внимание, что уставка SV задается в параметре PSEt, а полоса пропорциональности Хр не задается напрямую, а вычисляется по формуле (5):
где:
uPL и LoL – верхняя и нижняя границы измерения, задаваемые в °С;
P – коэффициент полосы пропорциональности, задаваемый в %.
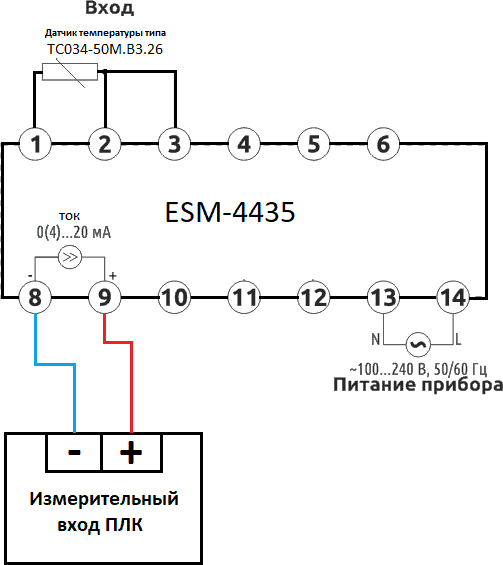
Приведем пример. Допустим, у нас имеется датчик температуры ТС034-50М.В3.26 с диапазоном измерения (-50…180) °С и панель оператора типа ELHART ELP-07 с измерительным входом 4…20 мА, настроенный на диапазон измерения (-10…120) °С. При этом у нас нет возможности перенастроить диапазон измерения программируемого логического контроллера, так как нет доступа к его программе.
Подключаем измеритель-регулятор ESM-4435 согласно схеме подключения, указанной на рисунке 7.
Задаем настройки ПИД-регулятора ESM-4435, согласно таблице 1.
| Номер параметра в сводной таблице | Имя параметра | Название параметра | Значение параметра |
|---|---|---|---|
| PSEt | Уставка регулятора | -10 °С | |
| 7 | iSSL | Тип входного сигнала | 1 – термопреобразователь сопротивления |
| 9 | rtdS | Тип термопреобразователя сопротивления | 3 – 50М с десятичной точкой |
| 18 | LoL | Минимальное значение шкалы измерения | -10,0 °С |
| 19 | uPL | Максимальное значение шкалы измерения | 120,0 °С |
| 23 | P | Коэффициент полосы пропорциональности | 100 % от диапазона LoL…uPL |
| 24 | I | Время интегрирования | 0 сек при установке 0 интегральная составляющая отключается программно |
| 25 | D | Время дифференцирования | 0 сек при установке 0 дифференциальная составляющая отключается программно |
| 40 | oAot | Тип выходного сигнала | 1 – ток 4…20 мА |
| 41 | oFnC | Режим работы регулятора | CooL – «Холодильник» |
В нашем случае, при настройках, указанных в таблице 1, параметр Хр будет равен:
Результат преобразования представлен на рисунке 8.
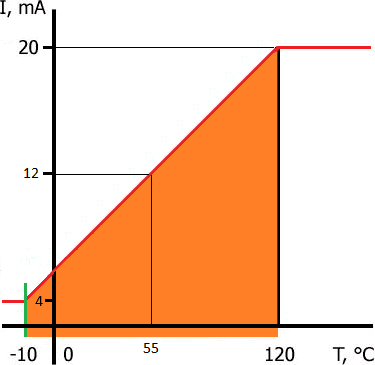
При измеренной температуре PV равной уставке SV, то есть -10°С , выходной сигнал равен 4 мА:
При измеренной температуре PV равной 55°С, выходной сигнал равен 12 мА:
При измеренной температуре PV равной 120°С, выходной сигнал равен 20 мА:
Что нам и требовалось получить.
Однако, данное решение не может служить равноценной заменой нормирующего преобразователя, так как основная масса общепромышленных ПИД-регуляторов, в том числе ESM-4435, существенно уступает им в точности измерения и точности формирования выходного сигнала, а компактность размещения измерительных преобразователей в разы выше.
Что касается точности, предел приведенной погрешности измерения для термопар, термопреобразователей сопротивления или датчиков с выходом в виде напряжения у ПИД-регулятора ESM-4435 составляет 0,25%, при этом погрешность формирования аналогового выхода не нормируется. Таким образом, использование ПИД-регуляторов в качестве нормирующих преобразователей возможно только в случае отсутствия высоких требований к точности преобразования. Представленные на рисунке 1 измерительные преобразователи серии К121 фирмы Seneca, напротив, имеют точность преобразования (ВНИМАНИЕ! Не измерения, а преобразования, то есть измерения + формирования выходного токового сигнала) всего ±0,1 % основной приведенной погрешности и ±0,01 %/°С дополнительной погрешности на каждый градус температуры окружающего воздуха относительно 20 °С. Соответственно, приборы типа К121 и подобные ему вносят минимальные искажения в измеряемый сигнал.
Что касается размеров, на рисунке 1б расположены 13(!) нормирующих преобразователей с общей шириной 6,2х13 = 80 (мм), где 6,2 — ширина К121, а 13 — их количество. 13 приборов ESM-4435 c размерами передней панели 48х48 мм при установке в один ряд будут иметь общую ширину 828 мм, при межосевом расстоянии между приборами равном 65 мм. В итоге имеем разницу в ширине компоновки приборов в один ряд 8 см против 83 см.
Таким образом, применение ПИД-регуляторов в качестве нормирующих преобразователей может служить временной мерой, применимой только в случае острой необходимости.
Инженер ООО «КИП-Сервис»
Матирный А.А.
При добавлении товара возникла ошибка. Пожалуйста, повторите попытку чуть позже.